The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-05-15 03:10:29 -0500 | received badge | ● Nice Question (source) |
| 2022-10-23 08:41:44 -0500 | received badge | ● Nice Question (source) |
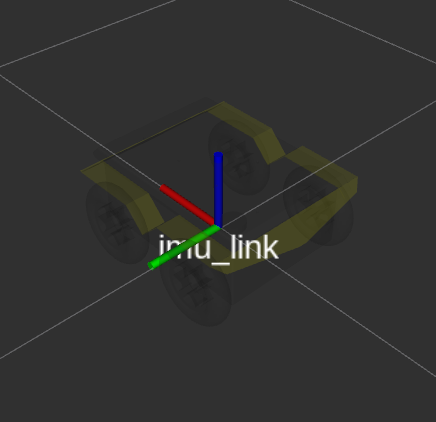
| 2022-10-12 10:01:45 -0500 | marked best answer | should IMU frame follow the red-East, green-North and blue-Up convention? Assuming an IMU without abs yaw. The starting pose of the robot is always at 0 yaw. Isn't ENU frame where: -Green axis points front(North) of vehicle -Red axis points right(East) of vehicle -Blue axis points up I'm slightly confused since I see in the Jackal simulator that the imu_link frame is the same as base_link(red-x, green-y,blue-z):
Here red points north, and green points west. Am I just misunderstanding something? Can someone clear this up for me? I know the jackal should be using a ENU imu as well. In my simulation I use hector_gazebo_plugin imu. Do I need to apply a transform(rpy) relative to baselink to indicate that the IMU is ENU? |
| 2022-09-21 10:22:32 -0500 | received badge | ● Nice Question (source) |
| 2022-09-16 09:29:07 -0500 | received badge | ● Famous Question (source) |
| 2022-09-16 09:29:07 -0500 | received badge | ● Popular Question (source) |
| 2022-09-16 09:29:07 -0500 | received badge | ● Notable Question (source) |
| 2022-09-11 11:05:39 -0500 | received badge | ● Famous Question (source) |
| 2022-08-24 18:37:24 -0500 | asked a question | remapping topics outside of node launchfile remapping topics outside of node launchfile Is it possible to avoid using remap tags within the same launchfile of the n |
| 2022-08-02 06:41:12 -0500 | received badge | ● Notable Question (source) |
| 2022-08-02 06:41:12 -0500 | received badge | ● Famous Question (source) |
| 2022-07-06 05:38:37 -0500 | received badge | ● Famous Question (source) |
| 2022-04-14 13:32:27 -0500 | received badge | ● Famous Question (source) |
| 2022-04-14 13:32:27 -0500 | received badge | ● Notable Question (source) |
| 2022-03-02 10:27:45 -0500 | received badge | ● Famous Question (source) |
| 2022-02-01 13:08:55 -0500 | marked best answer | how to call pause_physics service i cant seem to do: there doesn't seem to be a PausePhysics.srv anywhere under gazebo_msgs/srv I can see that the service is running in rosservice list, and I'm using groovy. What should I be doing instead? All I want is a way to toggle physics inside my code. |
| 2021-11-08 10:14:54 -0500 | received badge | ● Famous Question (source) |
| 2021-11-08 10:14:54 -0500 | received badge | ● Popular Question (source) |
| 2021-11-08 10:14:54 -0500 | received badge | ● Notable Question (source) |
| 2021-10-07 10:49:47 -0500 | received badge | ● Famous Question (source) |
| 2021-10-05 02:43:26 -0500 | received badge | ● Famous Question (source) |
| 2021-09-08 19:36:12 -0500 | received badge | ● Nice Question (source) |
| 2021-07-18 21:56:10 -0500 | received badge | ● Notable Question (source) |
| 2021-06-30 03:31:29 -0500 | received badge | ● Popular Question (source) |
| 2021-06-30 03:31:29 -0500 | received badge | ● Notable Question (source) |
| 2021-06-30 03:31:29 -0500 | received badge | ● Famous Question (source) |
| 2021-06-30 01:47:05 -0500 | received badge | ● Notable Question (source) |
| 2021-06-22 10:54:23 -0500 | received badge | ● Notable Question (source) |
| 2021-06-16 15:12:06 -0500 | received badge | ● Famous Question (source) |
| 2021-06-16 15:12:06 -0500 | received badge | ● Popular Question (source) |
| 2021-06-16 15:12:06 -0500 | received badge | ● Notable Question (source) |
| 2021-06-07 04:23:29 -0500 | received badge | ● Favorite Question (source) |
| 2021-06-07 04:22:52 -0500 | received badge | ● Popular Question (source) |
| 2021-06-03 13:57:32 -0500 | asked a question | measuring metrics, performance, etc for ROS robot? measuring metrics, performance, etc for ROS robot? Hi, I'm interested to learn more about best practices and existing |
| 2021-05-20 20:24:36 -0500 | received badge | ● Notable Question (source) |
| 2021-05-20 20:24:36 -0500 | received badge | ● Famous Question (source) |
| 2021-05-06 08:39:35 -0500 | received badge | ● Famous Question (source) |
| 2021-05-06 08:39:35 -0500 | received badge | ● Notable Question (source) |
| 2021-04-20 10:47:11 -0500 | received badge | ● Popular Question (source) |
| 2021-04-19 08:35:07 -0500 | marked best answer | Bridging ROS2 node and NON-ROS based applications on DDS hi, anyone have experience communicating with ROS2 at the DDS level? Past the abstraction. Say I have a ROS2 node that needs to communicate with an application on the same network, but is not running ROS at all. Is it as straightforward as using the DDS api? For this instance I'm using FAST RTPS I know that ROS2 simplifies the complexities of DDS, but is it practical for an external application to use the RTPS API to receive and send messages to ROS2? Is there a bridge for such a thing? |
| 2021-04-17 16:39:17 -0500 | received badge | ● Famous Question (source) |
| 2021-04-17 16:39:17 -0500 | received badge | ● Popular Question (source) |
| 2021-04-17 16:39:17 -0500 | received badge | ● Notable Question (source) |
| 2021-04-05 09:02:25 -0500 | marked best answer | Docker or snap for ROS projects Hi guys, recently I had to deal with issues in my project with different computers having slightly different environment. Ideally I want all the developers and robot to have the identical environment for both development and production. I read a little about docker as well as snap but kind of confused on which one is better fit for this. What does the general ROS community use? Is there any gotchas and limitations to either? I'm concerned it may require significant work to reconfigure my setup. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.