The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-08-08 08:03:45 -0500 | marked best answer | What means laserRetro in Gazebo Hi all! I'm not able to find documentation for parameter "laserRetro" of Gazebo world file. I saw this parameter in some file, but I'm not sure what exactly it means. |
| 2022-08-08 08:03:44 -0500 | received badge | ● Nice Question (source) |
| 2021-04-14 08:10:11 -0500 | marked best answer | Caught exception while loading: Character [-] Hello, today I made update of ROS (Ubuntu 11.04, ROS Electric from deb repo), run "roslaunch cob_bringup sim.launch" and then "rosrun rviz rviz", which gave me this error: [ERROR] [1317112938.826534360, 19.093000000]: Caught exception while loading: Character [-] at element [4] is not valid in Graph Resource Name [cob3-3]. Valid characters are a-z, A-Z, 0-9, / and _. Before update if worked fine. I'm using git version of cob_simulation stack (with env. variables ROBOT=cob3-2, ROBOT_ENV=ipa-kitchen, SIMX=-r). |
| 2019-12-09 23:10:08 -0500 | received badge | ● Notable Question (source) |
| 2018-11-14 19:27:11 -0500 | received badge | ● Nice Question (source) |
| 2018-05-28 21:55:59 -0500 | received badge | ● Popular Question (source) |
| 2018-05-16 08:26:14 -0500 | asked a question | Interactive markers to change scale of box marker Interactive markers to change scale of box marker Hi all. I'm playing around with interactive markers - it's easy to cre |
| 2018-05-04 07:40:58 -0500 | received badge | ● Favorite Question (source) |
| 2018-02-26 00:10:25 -0500 | marked best answer | Why is Twist message without timestamp Hi, I'm just wondering - what is the reason for fact, that Twist message has no timestamp? There is also TwistStamped message type, but as I know it's not commonly used for commanding robots... Why I'm asking... Because I would like to do some "postprocessing" to data from bag file and because of missing timestamp in cmd_vel topic, I'm not able to precisely compare influence of different commands on robot motion. |
| 2018-01-30 17:43:29 -0500 | marked best answer | Simulated robots in Gazebo/Hydro Hello, in Hydro, are there some working robot simulations? I mean Gazebo models etc. I know only about Turtlebot but I would rather do some experiments with an omnidirectional platform. Unfortunately, PR2 simulator stack is not available (doesn't compile) as well as Care-O-Bot (not released but there is hydro branch on github - need to try it)... |
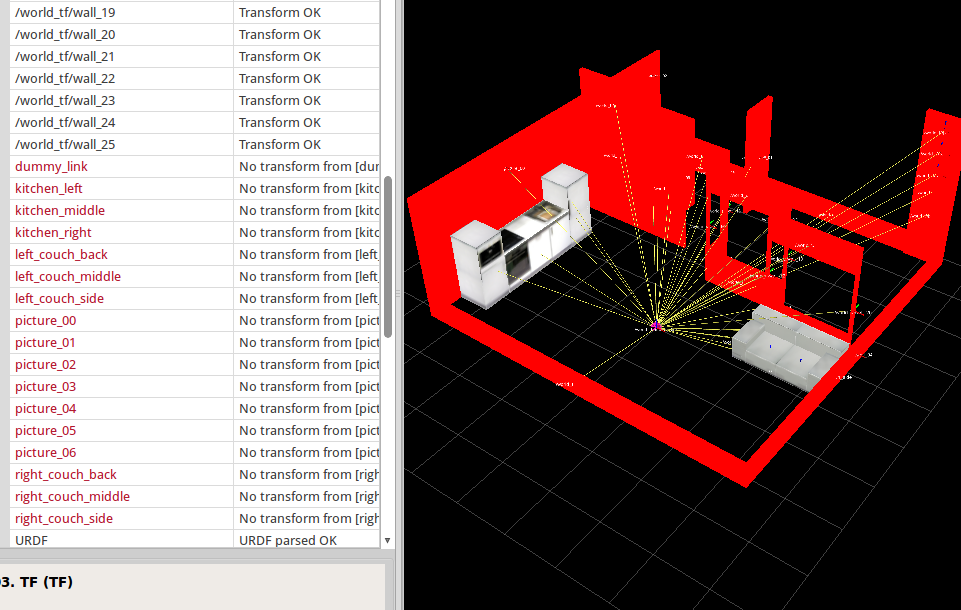
| 2017-12-05 10:59:55 -0500 | marked best answer | How to put more than one URDF model into RVIZ Hello, I would like to have more URDF models (next to robot's one) displayed in RVIZ (for example ipa-kitchen,cup, table...). How to do it correctly? Models have often same named links (dummy_link)... This is my current solution, but there are some errors in RVIZ as you can see... This is my launch file: http://pastebin.com/igmvk7cq Model looks good in RVIZ, but there are errors in robot model.
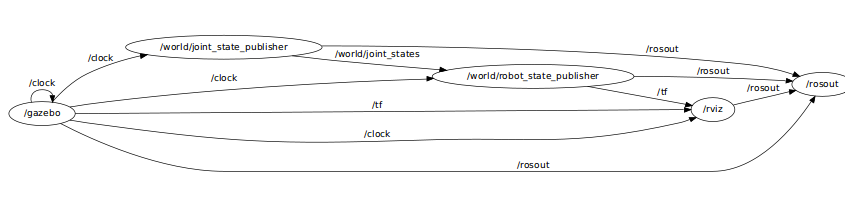
As you can see, there are /world_tf/xx transforms and also xx ones. Why? There is screenshot of rxgraph:
Output of roswtf: Found 2 warning(s). Warnings are things that may be just fine, but are sometimes at fault WARNING The following node subscriptions are unconnected: * /gazebo: * /gazebo/set_model_state * /gazebo/set_link_state WARNING These nodes have died: * world/spawn_urdf_world-2 Found 7 error(s). ERROR Communication with [/rviz] raised an error: ERROR Communication with [/rosout] raised an error: ERROR Communication with [/rxconsole_1319534397534378303] raised an error: ERROR Communication with [/world/joint_state_publisher] raised an error: ERROR Communication with [/gazebo] raised an error: ERROR Communication with [/world/robot_state_publisher] raised an error: ERROR The following nodes should be connected but aren't: * /world/joint_state_publisher->/world/robot_state_publisher (/world/joint_states) * /gazebo->/rviz (/tf) * /gazebo->/world/robot_state_publisher (/clock) * /gazebo->/world/joint_state_publisher (/clock) * /rosout->/rxconsole_1319534397534378303 (/rosout_agg) * /gazebo->/rviz (/clock) * /gazebo->/gazebo (/clock) * /world/robot_state_publisher->/rviz (/tf) Am I completely wrong with using join_state_publisher and robot_state_publisher (for fixed joints) or is there just some small mistake? Thanks a lot for any useful advice. Cheers :-) |
| 2017-06-29 06:24:38 -0500 | marked best answer | Robot looks different in RVIZ and Gazebo Hello, I make very basic URDF model of robot (ackermann like) - just box with four wheels and steering joints for front wheels. In RVIZ robot looks OK and there is no error (screenshot: http://mysharegadget.com/106788214). But when spawned in Gazebo it has no wheels and there are just rear wheels joints. Where might be problem? Robot also shakes himself and travel around, which is another problem - is it due to missing gazebo controller? I upload whole my package here. Update: I make model simpler - without steering joints. Now I can see in Gazebo even front wheels joints, but still no wheels. Model in RVIZ looks still ok. Updated package can be downloaded here. Thanks for advices. |
| 2017-06-26 03:02:23 -0500 | received badge | ● Famous Question (source) |
| 2017-03-15 05:01:02 -0500 | answered a question | Kinect V2 Skeleton Tracking Haven't tried it yet but there is this one: https://github.com/mcgi5sr2/kinect2_t... |
| 2017-01-31 06:13:14 -0500 | received badge | ● Notable Question (source) |
| 2017-01-31 03:55:55 -0500 | answered a question | rostest fails when run using "catkin_make run_tests" Answered on github: https://github.com/ros/catkin/issues/841 |
| 2016-12-21 07:48:55 -0500 | received badge | ● Popular Question (source) |
| 2016-12-19 04:08:20 -0500 | commented question | rostest fails when run using "catkin_make run_tests" Similar question found: http://answers.ros.org/question/22054... - however in my case I believe that messages are built but module can't be found for some reason. |
| 2016-12-14 11:47:55 -0500 | asked a question | rostest fails when run using "catkin_make run_tests" Hi all, I have a node and some_test.test file like this: The node and test script "test_node_api.py" both import messages from some other package (my_msgs). The node itself works fine (roslaunch some_package node.launch). When I run the test like this: it also works fine (passes). However, when I use "catkin_make run_tests" the node (in node.launch) fails to start with import error of my_msgs.msg module. What might be wrong? The CMakeLists.txt file looks like this: UPDATE: Results can be seen here (some_package is actually art_db): http://pastebin.com/qu7SfLK6 - line 143 says "ImportError: No module named art_msgs.msg". However, if I do "catkin_make" several times, the "catki_make run_tests" eventually gives success. Calling "rostest art_db art_db.test" always leads to success. The package can be found here: https://github.com/ZdenekM/ar-table-i... . |
| 2016-10-02 08:45:48 -0500 | received badge | ● Nice Answer (source) |
| 2016-08-08 01:39:30 -0500 | marked best answer | Navigation stack vs. sensor with dead zone Hi all, I'm trying to use navigation stack with a laser scanner which gives points from at least one meter distance. Move_base works fine but, when the robot (Pioneer) is close to an obstacle, the obstacle disappear from laser data, obstacle is cleared from costmap and robot hits it. Is there any possible solution? I'm using ROS Groovy and hydro-devel branch of navigation stack. UPDATE: Right now, I'm working only with simulation. Value range_min seems to be filled correctly. angle_min: -3.1400001049 angle_max: 3.1400001049 angle_increment: 0.0015335775679 time_increment: 0.0 scan_time: 0.0 range_min: 1.0 range_max: 10.0 These are my settings (not yet transformed to the new format)... Global costmap: Local costmap: Common params: UPDATE: It seems that nav. stack ignores range_min in LaserScan msg (https://github.com/ros-planning/navigation/blob/hydro-devel/costmap_2d/plugins/obstacle_layer.cpp#L196). |
| 2016-07-27 11:18:42 -0500 | received badge | ● Necromancer (source) |
| 2016-03-13 15:04:52 -0500 | received badge | ● Famous Question (source) |
| 2015-12-10 03:33:25 -0500 | received badge | ● Self-Learner (source) |
| 2015-11-28 16:33:54 -0500 | received badge | ● Famous Question (source) |
| 2015-08-31 08:14:49 -0500 | commented answer | Microstrain 3DM-GX3-45 with imu_drivers I haven't tried it under Indigo yet. Our robots run on Hydro. Btw, there is some new API from Microstrain: http://lord-microstrain.github.io/MSCL/ -> it would be great to build ROS driver on top of this. |
| 2015-06-22 12:30:01 -0500 | marked best answer | Running RViZ through X forwarding on headless machine Hello, is there possibility to run RViZ remotely on headless machine using X forwarding (ssh -X)? The problem is that remote machine (server) doesn't have graphic card with OpenGL support so, there is MESA installed. For instance, glxgears runs, but RViZ crashes (Segmentation fault) as well as Gazebo (GLXBadDrawable). Of course that I can overcome this by running RViZ locally but I would like to avoid ROS installation on client's machine. Thanks for any hint. gdb output: Not sure if it's useful but this is OGRE log: |
| 2015-06-22 01:00:55 -0500 | received badge | ● Enlightened (source) |
| 2015-04-21 04:02:36 -0500 | received badge | ● Good Question (source) |
| 2015-04-10 04:52:44 -0500 | received badge | ● Notable Question (source) |
| 2015-04-10 04:52:44 -0500 | received badge | ● Famous Question (source) |
| 2014-12-12 21:30:42 -0500 | received badge | ● Popular Question (source) |
| 2014-12-12 06:31:33 -0500 | answered a question | libuvc_camera vs. libuvc Ok, I missed that release repository has more branches - there is release/indigo/libuvc branch which contains catkin package. |
| 2014-12-10 09:03:04 -0500 | asked a question | libuvc_camera vs. libuvc Hello, I would like to compile libuvc_camera with current (git) version of libuvc. The libuvc library is released into ROS but I can't find any catkin package for it. There is release repository ( https://github.com/ktossell/libuvc-re... ) and repository with non-ROS library ( https://github.com/ktossell/libuvc ). Do I miss something? How can I compile it as a ROS package - to overlay released version (/opt/ros/indigo/share/libuvc)? |
| 2014-11-21 22:58:57 -0500 | received badge | ● Famous Question (source) |
| 2014-10-14 20:07:57 -0500 | received badge | ● Popular Question (source) |
| 2014-10-14 20:07:57 -0500 | received badge | ● Notable Question (source) |
| 2014-09-15 06:32:10 -0500 | commented question | Any simple simulators suitable for multi-UAV applications? What about MORSE? Or V-REP? Both have integration to ROS and can do 'kinematical' simulation (no CPU intensive physics computations). |
| 2014-08-11 04:30:05 -0500 | commented answer | Gains optimization package? For identification, you need some control input (velocity, position, etc). Sine is used quite often for this purposes. Another approach might be pseudorandom binary sequence. |
| 2014-07-24 16:09:40 -0500 | received badge | ● Famous Question (source) |
| 2014-06-17 00:24:20 -0500 | commented question | local communication in Gazebo Do you mean something like RFID / NFC? |
| 2014-06-16 06:47:08 -0500 | commented question | transform a matrix with tf What kind of representation are you using? You will probably need to write your own code for this. But it should be pretty easy - just use TF for point 0,0 of your matrix and that's it, am I right? |
| 2014-06-12 06:08:57 -0500 | commented answer | sbpl on Hydro compilation error @acp: You need to set "base_global_planner" parameter to "SBPLLatticePlanner" - planner will be loaded at runtime. It's same as with other planners - you don't need to run them separately. See this: https://github.com/trainman419/dagny_nav/blob/master/dagny_nav_launch/dagny_nav.yaml |
| 2014-06-10 09:58:30 -0500 | received badge | ● Notable Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.