The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2014-07-18 19:08:18 -0500 | received badge | ● Famous Question (source) |
| 2014-06-26 02:21:48 -0500 | received badge | ● Famous Question (source) |
| 2014-04-22 21:56:33 -0500 | received badge | ● Popular Question (source) |
| 2014-04-22 21:56:33 -0500 | received badge | ● Notable Question (source) |
| 2014-04-14 07:36:29 -0500 | received badge | ● Nice Question (source) |
| 2014-04-14 05:43:11 -0500 | received badge | ● Notable Question (source) |
| 2014-03-20 14:00:56 -0500 | received badge | ● Famous Question (source) |
| 2014-02-10 18:28:16 -0500 | received badge | ● Enthusiast |
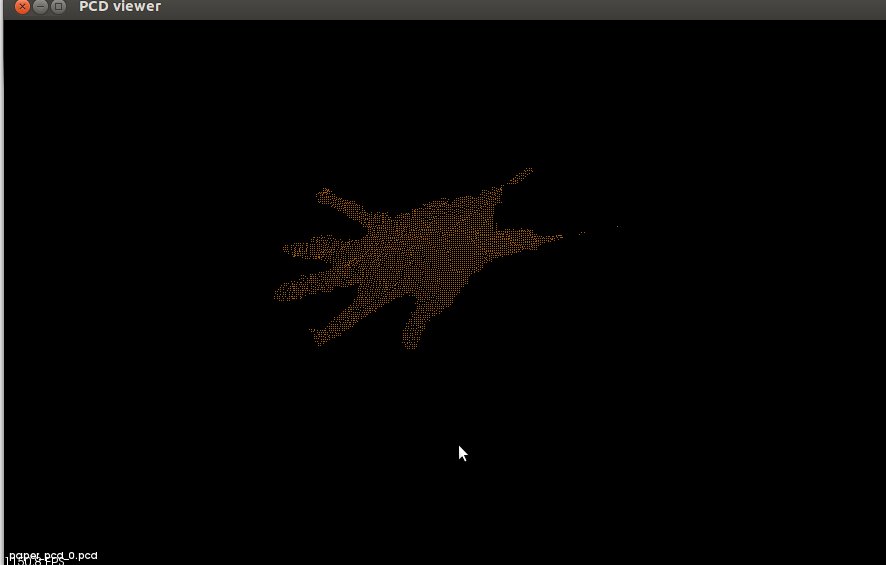
| 2014-02-03 20:21:04 -0500 | asked a question | Hand Gesture Recognition - PointCloud to Image Hello guys, I'm doing a hand gesture recognition project, but I'm still with some doubts and looking for some answers. Probably here is not the right place for my questions and discussions, maybe better in the PCL Forum. But my final purpose is use the project in a ROS Robot, and many users are in both forums, so I will ask. Actually is more a discussion, some advices than properly a question. I'm using PCL and a filter (now using a passthrough filter, but probably will change to a nearest filter) to acquire a hand image. Like in this image:
With this image, I read and searched a lot of PCL tutorials about using it for recognition and tested some of them, but they work better for static images / separate clouds and not for this kind of real-time application where the only cloud is the Hand. Is there any good algorithm/code for this purpose? So, using this image i need to recognize it as a 5 finger-position. My idea now is to use this image to generate a 2D OpenCV Image to do a training and use for recognition. But I don't know how to do it, i tried change from Point Cloud to sensor_msgs::Image but it didn't work well. Another point is that I only could save it as PointCloudXYZ and not PointCloudXYZRGBA, so I don't have the RGB values. Is there a good way I can do this transformation and from this Point Cloud Image, generate a 2D Image? Probably using just 2 axis (x,y) to get the hand contours.. I know is kind of a vague question, but thank you very much of your attention. And I think we can have a good discussion about how to solve and do this project, Luiz Felipe. |
| 2014-01-31 00:52:44 -0500 | received badge | ● Notable Question (source) |
| 2014-01-29 05:11:46 -0500 | received badge | ● Student (source) |
| 2014-01-28 01:33:33 -0500 | commented question | Unable to #include pcl files in header Try to add manually the source: source /opt/ros/fuerte/setup.bash , or something like that and run again. Let me know if the same error occur. |
| 2014-01-28 00:48:52 -0500 | commented question | Unable to #include pcl files in header I think you will get errors trying to compile this file. But let's try to solve your first problem. When you look for roscd pcl_ros you find nothing, right? And what is your ROS distribution and Ubuntu Release? |
| 2014-01-28 00:06:17 -0500 | commented question | error compiling PCL ROS Tutorial The first part of the tutorial worked fine? |
| 2014-01-27 23:59:11 -0500 | commented question | OpenCV error using PCL + ROS + Kinect I'm with this problem now, someone know the answer? |
| 2014-01-27 00:10:35 -0500 | received badge | ● Teacher (source) |
| 2014-01-26 23:51:08 -0500 | received badge | ● Popular Question (source) |
| 2014-01-26 22:40:26 -0500 | answered a question | Compilation errors after ROS update (ros/datatypes.h missing?) I think I had the same problem a week ago. Try these commands: Let me know if this works. Another problem (if you plan to use kinect) I had with Ubuntu 13.04 was with the openni libraries. I needed to go back to the 12.04. Regards |
| 2014-01-26 20:51:42 -0500 | commented answer | Write PCD File from a Topic - Hydro + PCL (Migration) Thank you Tirjen! It worked using sensor_msgs/PointCloud2 =) |
| 2014-01-26 20:50:57 -0500 | received badge | ● Scholar (source) |
| 2014-01-26 18:17:28 -0500 | commented answer | Running PCL in Hydro Hello aknirala, i followed your tutorial and is working for me. But now, I can't save one input Point Cloud 2 to a PCD File. I think I need to follow some conversions first. My code is here: http://answers.ros.org/question/121856/write-pcd-file-from-a-topic-hydro-pcl-migration/ Thank you! |
| 2014-01-24 01:01:49 -0500 | commented question | Write PCD File from a Topic - Hydro + PCL (Migration) Yes Wolf, the publisher is working fine with the type. The problem is to save the PCD File, because I can't use sensor_msgs/PointCloud2 type. The pcl::io::savePCDFileASCII function. So I need to do some transformation before. int pcl::io::savePCDFileASCII(const string&, const pcl::PointCloud<pointt>&) |
| 2014-01-23 22:53:10 -0500 | asked a question | Write PCD File from a Topic - Hydro + PCL (Migration) Hello, I'm doing a hand gesture recognition project and I am having some troubles with the migration of the PCL data types to ROS Hydro. I started with Hydro + PCL this week so, not all the concepts are really clear for me. I'm using Ubuntu 12.04. My problem is to transform the data that come from my passthrough filter (sensor_msgs/PointCloud2) to a pcl::PointCloud pcl::PointXYZRGB, so I can write the data using the savePCDFileASCII function. My code is: As you guys can see in my code, I tried some transformations after reading the hydro/Migration page, but I couldn't figure it out what i need to do to make my code work. The error while doing catkin_make is a no matching function because the type error: Thank you very much for your attention. |
| 2014-01-23 01:10:28 -0500 | answered a question | OpenNI - no device connected (kinect) Hi Rolias, try this command: sudo apt-get install ros-hydro-openni-camera and launch the opeeni launcher again. The same problem occurs? Regards. |
| 2014-01-23 01:04:33 -0500 | answered a question | OpenNI - no device connected (kinect) Hello, Rolias. I am complete beginner too and started to work with Ros Hydro + Kinect this week. The solution of your problem is change the command, change roslaunch to rosrun: rosrun openni_launch openni.launch Best Regards. |
| 2014-01-12 22:22:22 -0500 | received badge | ● Popular Question (source) |
| 2014-01-10 20:01:50 -0500 | asked a question | Fatal - pan_tilt_port: No motors found Hello Everyone, I'm following the tutorial dynamixel_controllers/Tutorials/ConnectingToDynamixelBus and I cannot found my motor AX12+. I'm testing just one AX12+ on Linux 12.04 and 13.04 and both do not work. My When I ran the roslaunch command my last lines before the error are: I already tried with 3 different AX12+ motors and always the same error. I'm using a 9V power supply and seems perfectly working, the motor blink once when the power source is connected. Thank you very much for the attention. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.