
while planning motion my model brokes in moveit [closed]

Hi
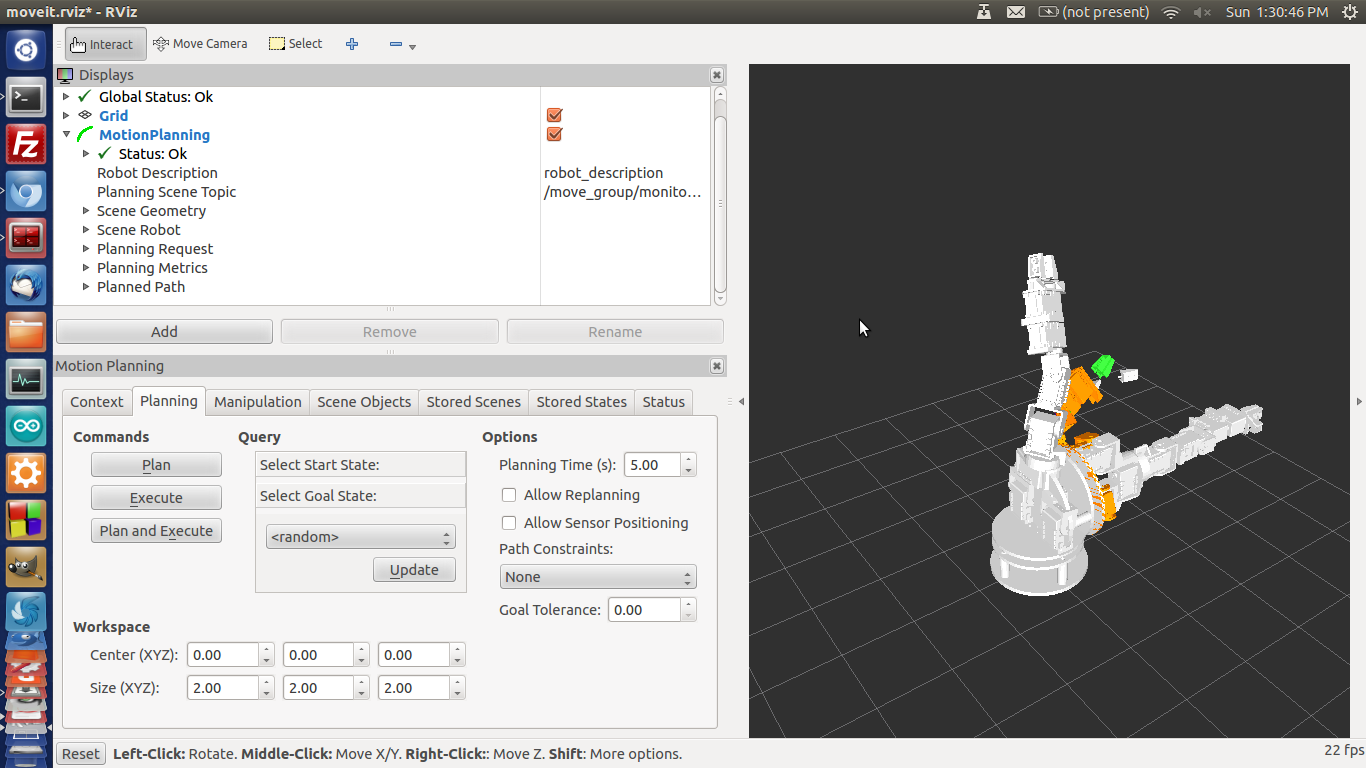
I am created a URDF file and moveit configuration file for my 6-DOF arm in ros-hydro. Now while I running demo.launch and plan to a random position my model collapse ( Its pic added below). I am not found this problem before while i working in groovy. What may be the problem
Closed for the following reason
the question is answered, right answer was accepted by
unais
close date 2013-11-03 19:04:20
add a comment
