
how to apply transform to data displayed in RVIZ?
Hello,
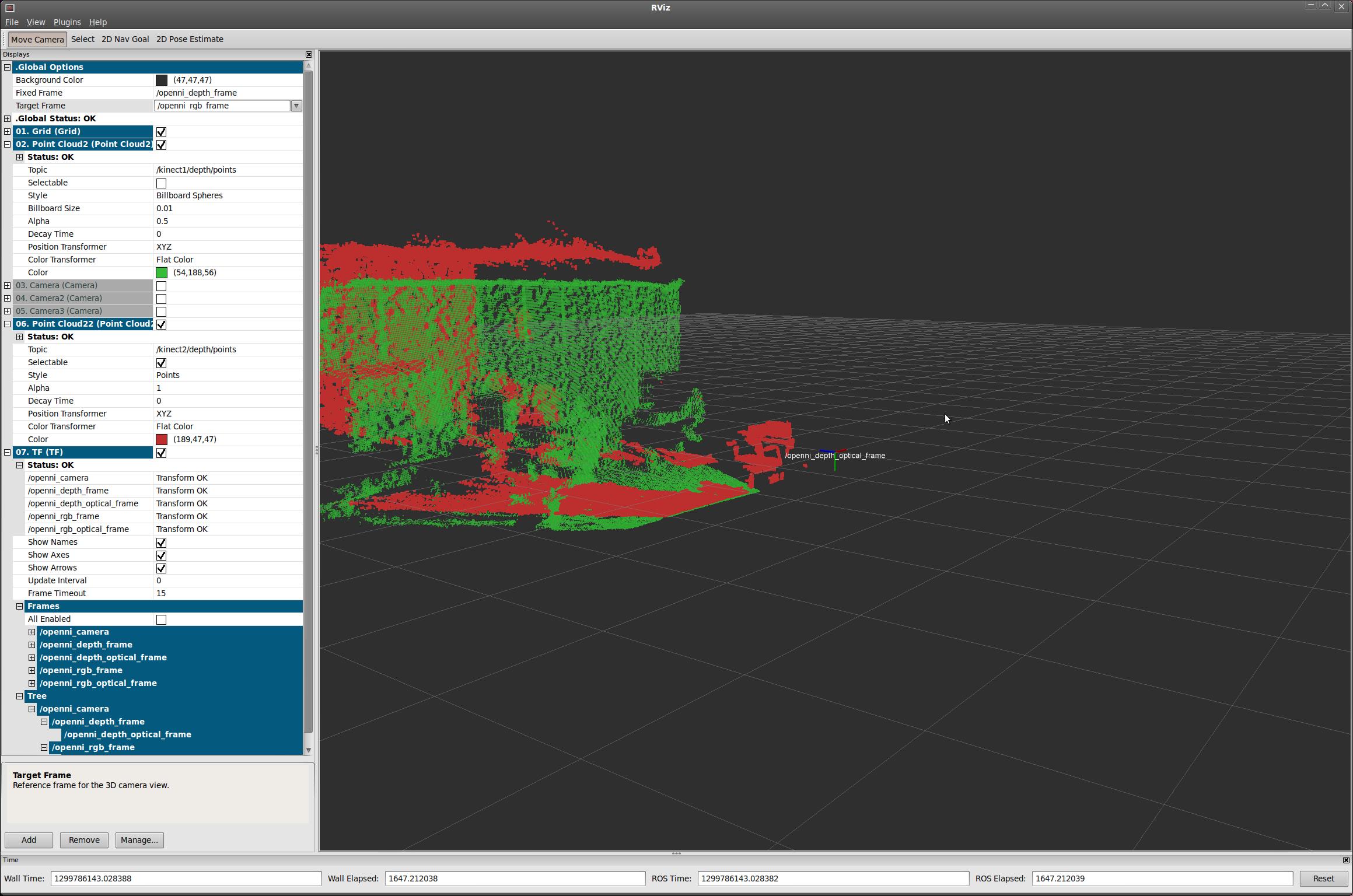
I am getting pointcloud data from different kinects which are facing each other and I am trying to visualize using "rviz". I want to apply a transform (rotate 180 around y-axis) to one of the point clouds and display it, any ideas on how do this? Thank you.
My launch files: Kinect1_openni_node.launch, Kinect2_openni_node.launch, kinect_frames1.launch, kinect_frames2.launch
As you can see in the image the opposite walls are displayed on the same side i.e. w.r.t to their (kinect's) axes.
UPDATE: Here's the output of the transforms
rosrun tf tf_echo /openni_depth_frame /openni_depth_optical_frame1
At time 1299860886.324
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
in RPY [0.000, -0.000, 0.000]
rosrun tf tf_echo /openni_depth_frame /openni_depth_optical_frame2
At time 1299860897.873
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [-0.707, -0.001, 0.707, -0.001]
in RPY [0.000, 1.570, -3.140]
Even then I don't see any change, it's the same as the image above. Am I missing any settings in RViz?? Best, CV
add a comment

