
current goal not being published [closed]
Update: It was my understanding from watching a youtube vid that the current goal topic caused an arrow to appear near the robot and this was different then the simple goal. This does not appear to be the case. Further the neither goal is published more then once so the arrows are lost fairly easily. The current goal is published buy only once.
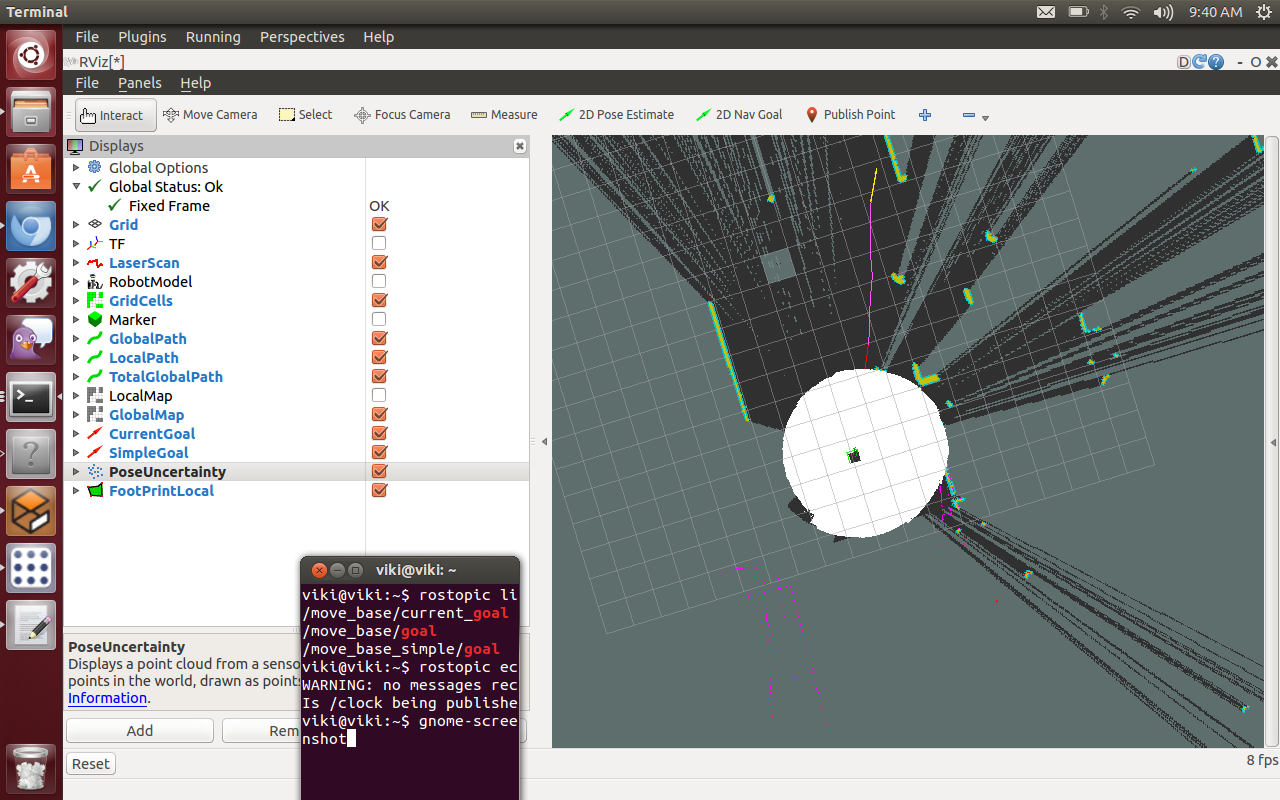
Update: I noticed that when I change the arrow to axis for move_base/simple_goal it changes the arrow in the map but when I change the arrow to axis for move_base/current_goal it changes the SAME arrow to axis as if it is treating the simple goal as the current goal. Also the goal arrow does not toggle when the check box is toggled it just disappears.
Update: I noticed that rviz current goal panel says the move_base/current_goal topic is OK. But when I do a echo on it it say not published.
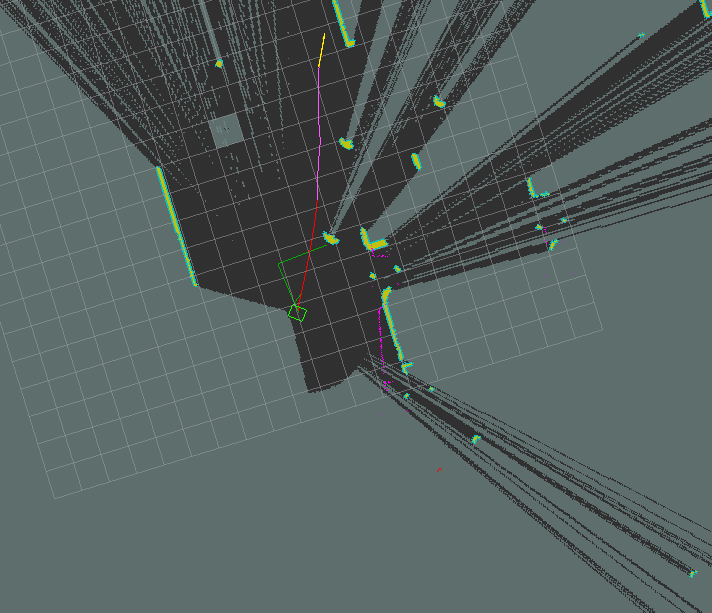
For some reason the move_base/current_goal is not being published. The current DWA path is all over the place but the total path and global path are fine as can be seen from the screen image. I also save an image for /move_base/TrajectoryPlannerROS/cost_cloud which shows the that the robot is unable to determine its positon. Where is the problem? Why is the current path published but not the current goal. The global goal is the yellow arrow.
Move base status shows that it has accepted and is following the goal. But there is no status list.
header:
seq: 95
stamp:
secs: 24
nsecs: 923000000
frame_id: ''
status_list:
-
goal_id:
stamp:
secs: 16
nsecs: 608000000
id: /move_base-1-16.608000000
status: 1
text: This goal has been accepted by the simple action server
viki@viki:~$ rostopic echo /move_base/current_goal
WARNING: no messages received and simulated time is active.
Is /clock being published?

How you set the global goal in the global cost map? Is it a simple (x,y) co-ordinate?
I used the setGoal on the rviz main menu.
Have your robot take the goal position co-ordinate dynamically and move to that place immediately? By the way how you paste the images?
There is an icon at the top edit panel looks like a box. Will pop up dialog to select picture.