
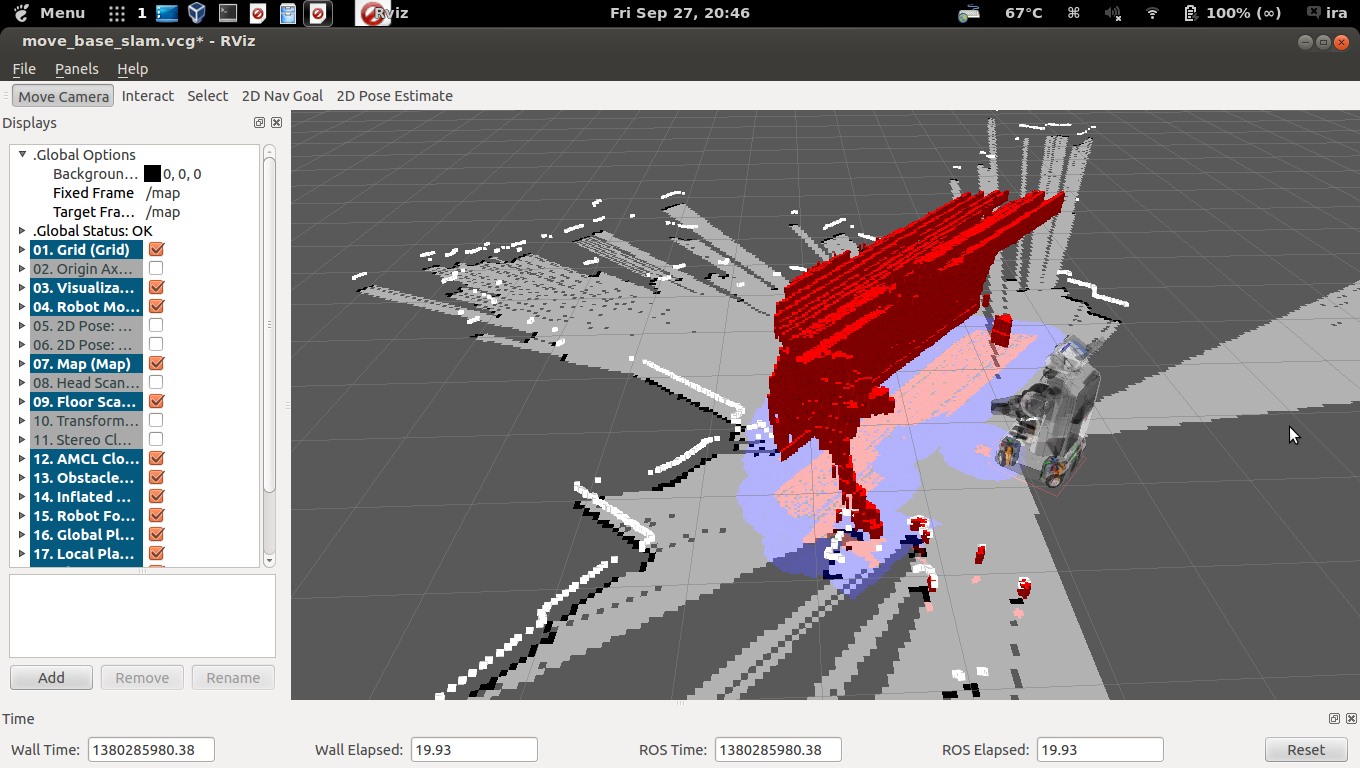
Tilting Laser Problem : PR2 blocked by a virtual obstacle wall
When I run the pr2_2dnav_slam, the tilting laser seems to have some problem. Therefore the robot will think that it is stuck in the obstacles and won't move.
Then I try to show the tilting laser alone.
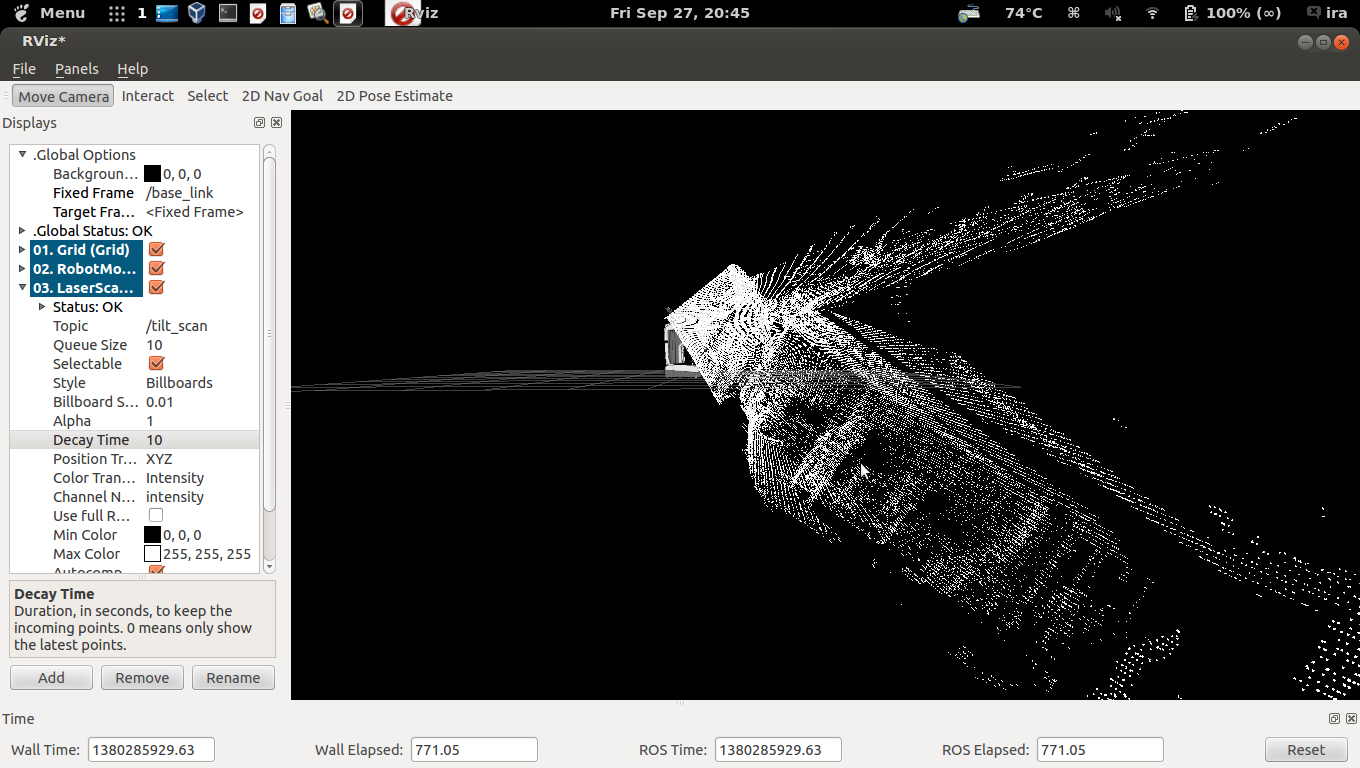
It looks like that there are some problem with the transform from the tilting laser to the base_link.
Beside, the laser seems to be wrapped up in a circle, which is very similar to the condition in fig1.
Is there any wrong with the setting of the tilting laser, or what might the problem be?
Thanks for any advise.
add a comment

