
STUCK at Turning!!!!!! Navigation help!
please help guys. 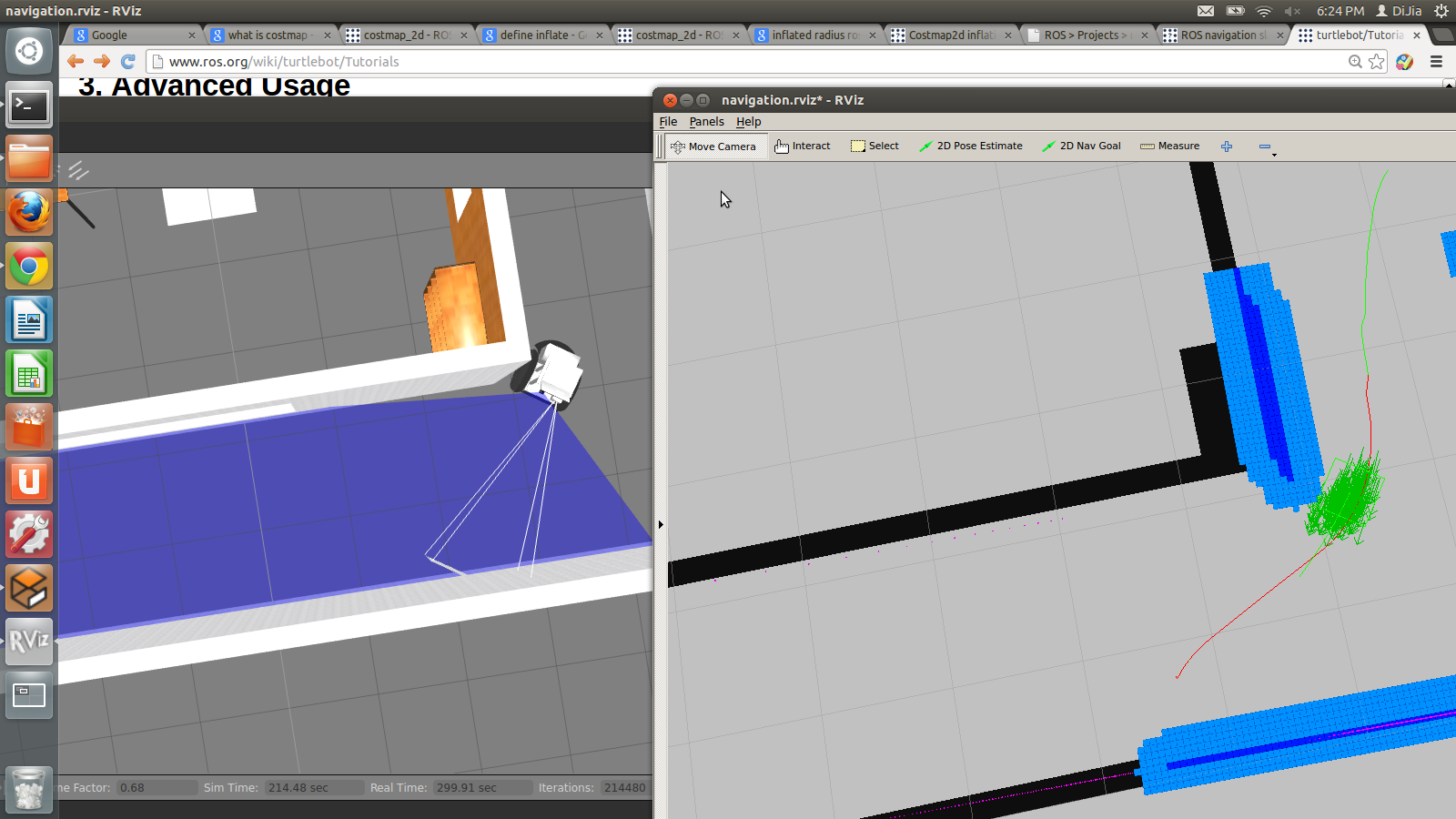
Please refer to the picture. As you can see, whenever the robot is turning, it will stuck at the corner. It just stays at there instead of performing recovery plan, back up, etc. But then you don't have a sharp turn like this, navigation works great. It would be awesome if you guys could help to debug a little, because I had already investigated with the params offered by the stacks. Thank you all in advance.
Here is my configuartion.
TrajectoryPlannerROS:
max_vel_x: 1.0
min_vel_x: 0.2
max_rotational_vel: 1.6
min_rotational_vel: 0.2
min_in_place_rotational_vel: 0.2
acc_lim_th: 2.2
acc_lim_x: 2.5
acc_lim_y: 2.5
holonomic_robot: false
goal_distance_bias: 0.8
path_distance_bias: 0.8 #[working on 8.0]
occdist_scale: 0.01
heading_lookahead: 0.325
dwa: false
escape_vel: -0.8
sim_time: 1.0
sim_granularity: 0.025
vx_samples: 3
vtheta_samples: 20
yaw_goal_tolerance: 0.8 # about 6 degrees
xy_goal_tolerance: 0.2 # 5 cm
add a comment

