
Octomap visualization doesn't display anything - rgbdslam
I have the same problem as described here: http://answers.ros.org/question/53228/rgbdslam-cannot-produce-octomap/. However, when I execute rostopic echo /rgbdslam/batch_clouds, a long list of integers is outputted so I assume this is working. I don't understand why octomap viewer only contains an empty blue cube when I try to load the octomap I saved. How can I fix this?
Edit: I have attached a screenshot of the rxgraph: 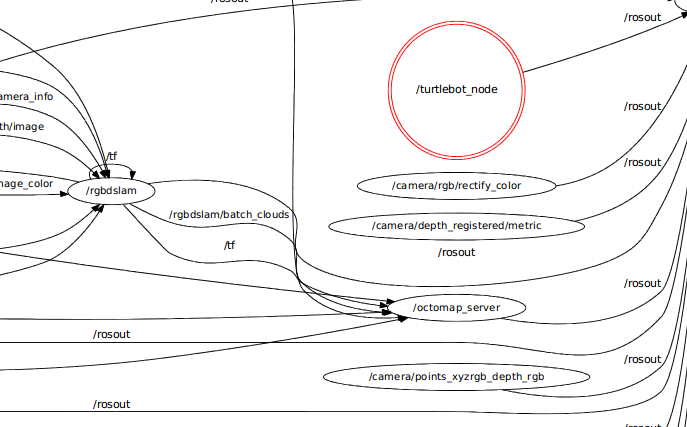
By the way, I get this output when saving the octomap, but I don't see /octomap_binary in the graph. Is that the issue?
rosrun octomap_server octomap_saver test2.bt
[ INFO] [1369321237.790118097]: Requesting the map from /octomap_binary...
[ INFO] [1369321237.809273887]: Map received, saving to test2.bt
Edit 2: I just found this topic: http://answers.ros.org/question/9965/how-to-get-octomap-to-store-data-sent-by-rgbdslam/. I downloaded Octomap using apt-get install; do I need another version?
Edit 3: This is the output I get from launching openni:
SUMMARY
========
PARAMETERS
* /camera/depth/rectify_depth/interpolation
* /camera/depth_registered/rectify_depth/interpolation
* /camera/disparity_depth/max_range
* /camera/disparity_depth/min_range
* /camera/disparity_depth_registered/max_range
* /camera/disparity_depth_registered/min_range
* /camera/driver/depth_camera_info_url
* /camera/driver/depth_frame_id
* /camera/driver/depth_registration
* /camera/driver/device_id
* /camera/driver/rgb_camera_info_url
* /camera/driver/rgb_frame_id
* /rosdistro
* /rosversion
NODES
/camera/depth/
metric (nodelet/nodelet)
metric_rect (nodelet/nodelet)
points (nodelet/nodelet)
rectify_depth (nodelet/nodelet)
/camera/rgb/
debayer (nodelet/nodelet)
rectify_color (nodelet/nodelet)
rectify_mono (nodelet/nodelet)
/
camera_base_link (tf/static_transform_publisher)
camera_base_link1 (tf/static_transform_publisher)
camera_base_link2 (tf/static_transform_publisher)
camera_base_link3 (tf/static_transform_publisher)
camera_nodelet_manager (nodelet/nodelet)
/camera/
disparity_depth (nodelet/nodelet)
disparity_depth_registered (nodelet/nodelet)
driver (nodelet/nodelet)
points_xyzrgb_depth_rgb (nodelet/nodelet)
register_depth_rgb (nodelet/nodelet)
/camera/ir/
rectify_ir (nodelet/nodelet)
/camera/depth_registered/
metric (nodelet/nodelet)
metric_rect (nodelet/nodelet)
rectify_depth (nodelet/nodelet)
core service [/rosout] found
process[camera_nodelet_manager-1]: started with pid [20137]
process[camera/driver-2]: started with pid [20138]
process[camera/rgb/debayer-3]: started with pid [20166]
[ INFO] [1369429911.881946647]: Initializing nodelet with 4 worker threads.
process[camera/rgb/rectify_mono-4]: started with pid [20203]
process[camera/rgb/rectify_color-5]: started with pid [20225]
process[camera/ir/rectify_ir-6]: started with pid [20280]
process[camera/depth/rectify_depth-7]: started with pid [20355]
process[camera/depth/metric_rect-8]: started with pid [20425]
process[camera/depth/metric-9]: started with pid [20459]
process[camera/depth/points-10]: started with pid [20515]
process[camera/register_depth_rgb-11]: started with pid [20541]
process[camera/depth_registered/rectify_depth-12]: started with pid [20561]
process[camera/depth_registered/metric_rect-13]: started with pid [20621]
process[camera/depth_registered/metric-14]: started with pid [20647]
process[camera/points_xyzrgb_depth_rgb-15]: started with pid [20667]
process[camera/disparity_depth-16]: started with pid [20728]
process[camera/disparity_depth_registered-17]: started with pid [20757]
process[camera_base_link-18]: started with pid [20815]
process[camera_base_link1-19]: started with pid [20834]
process[camera_base_link2-20]: started with pid [20852]
process[camera_base_link3-21]: started with pid [20907]
[ERROR] [1369429921.870903205]: Tried to advertise a service that is already advertised in this node [/camera/depth_registered/image_rect_raw/compressedDepth/set_parameters]
[ERROR] [1369429921.918984524]: Tried to advertise a service that is already advertised in this node [/camera/depth_registered/image_rect_raw/compressed/set_parameters]
[ERROR] [1369429921.962493901]: Tried to advertise a service that is already advertised in this node [/camera/depth_registered/image_rect_raw/theora/set_parameters]
However, the GUI is listening ...

