
Can't get correct position of ARMarkers
Hi everyone!
I'm using ar_pose to identify some markers. It identifies the markers correctly (pattern 1, 2, etc.), but their positions are not very good. The distance is not being correctly assigned. I guess this is not ar_pose's problem.
See the image below:
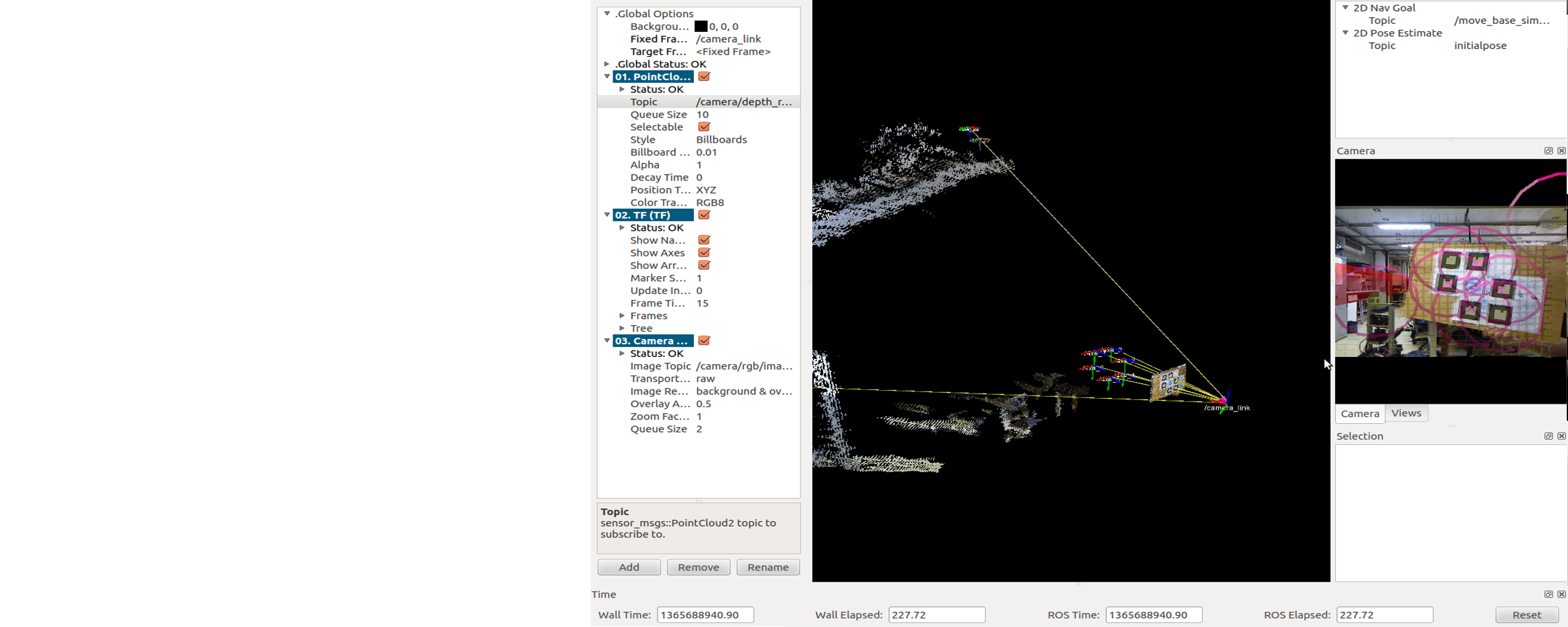
Could it be a depth_registration issue?
Also, I tried calibrating my camera (kinect) following these tutorials:
If couldn't make myself clear, please, tell me, so that I can explain it better.
I would really appreciate if someone could help me!
Thanks!
add a comment

