
Problem using Qt creator with ROS
HI,
I'm trying to use Qt creator to edit my ROS files, I have read a few advices about how to do it. I'll try to explain what I've done and the problems I have concisely:
- Create a normal ROS pkg using roscreate-pkg (e.g. $roscreate-pkg test roscpp)
Given that Qt has some enviromental issues, I've launched Qt creator from command using:
$ sudo -s
$ qtcreator
Now I have the welcome page, and I click on Open Project and go to where my project is located in this case: /home/david/fuerte_workspace/sandbox/test and I select the CMakeLists.txt
Now I have this image:
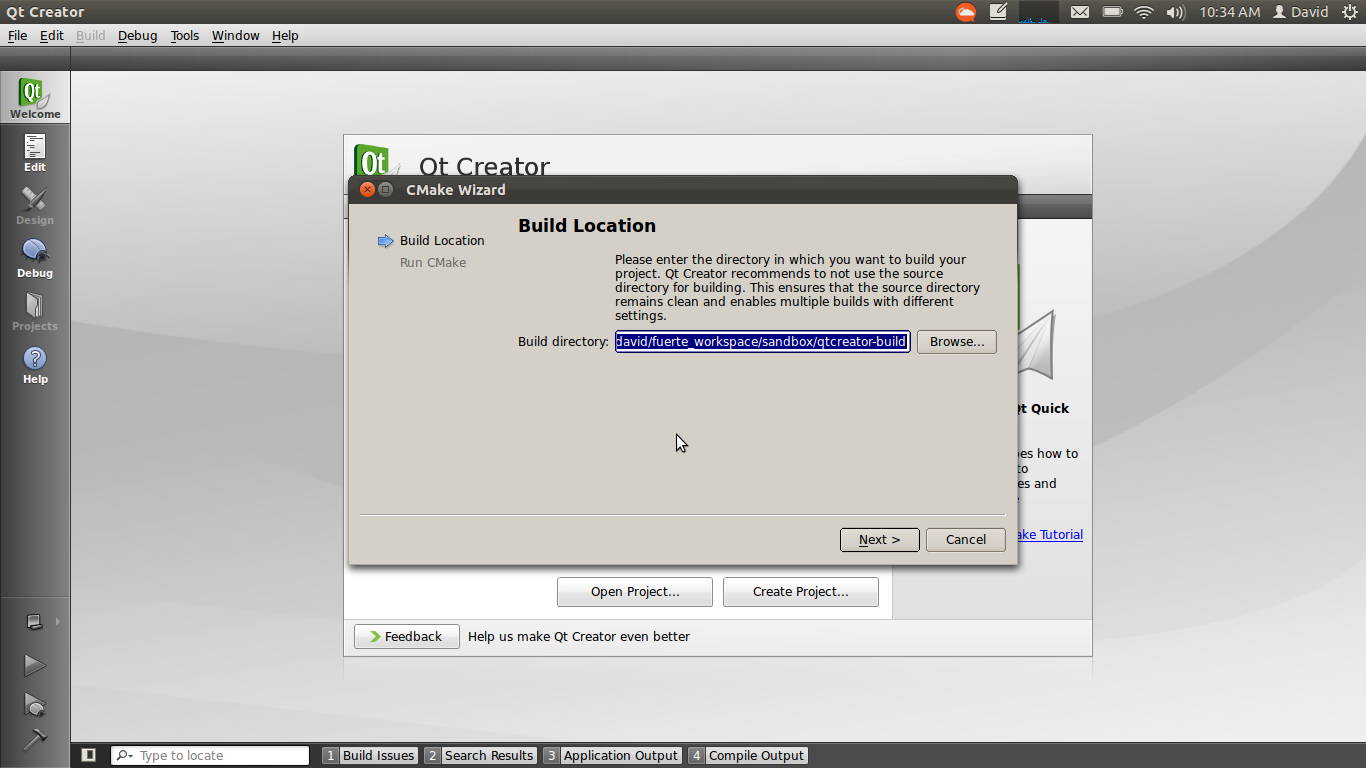
- I cliked on continue (just accepted the default option), and led me here:
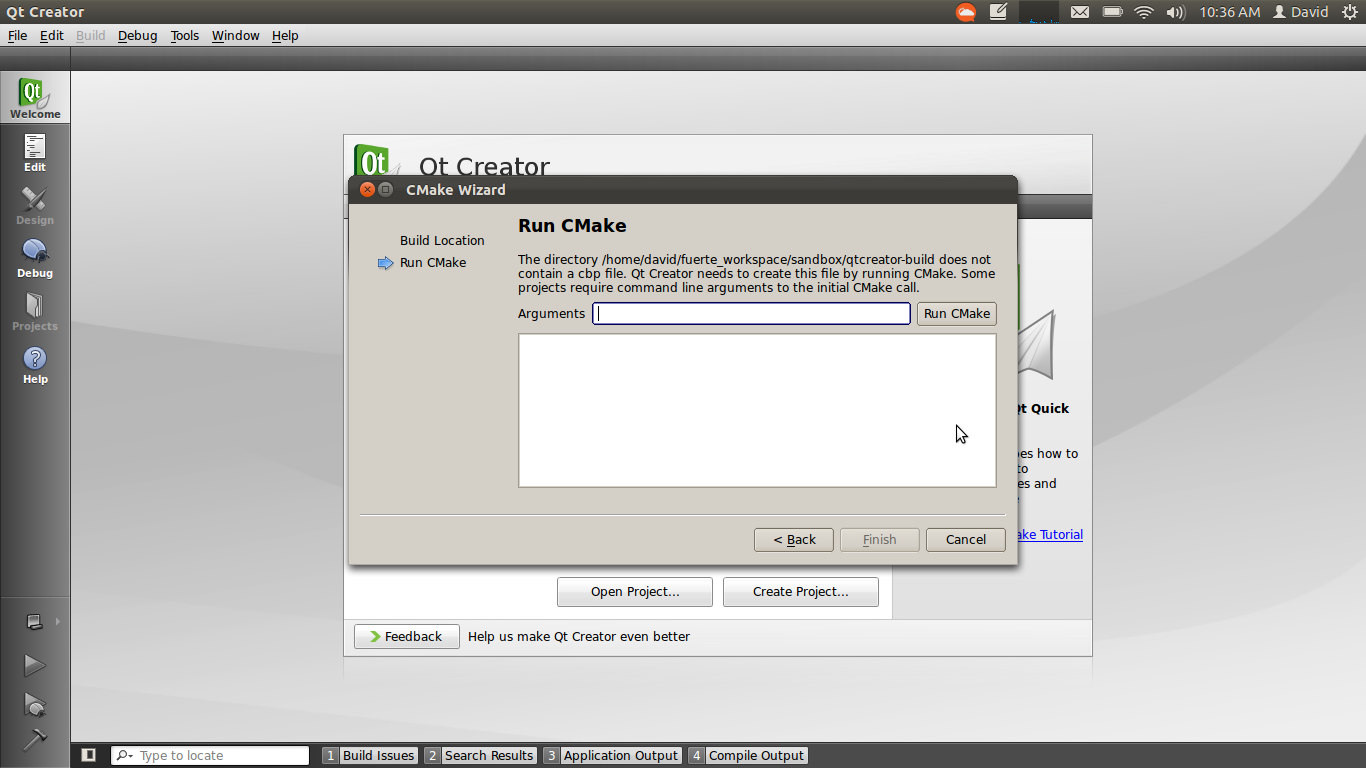
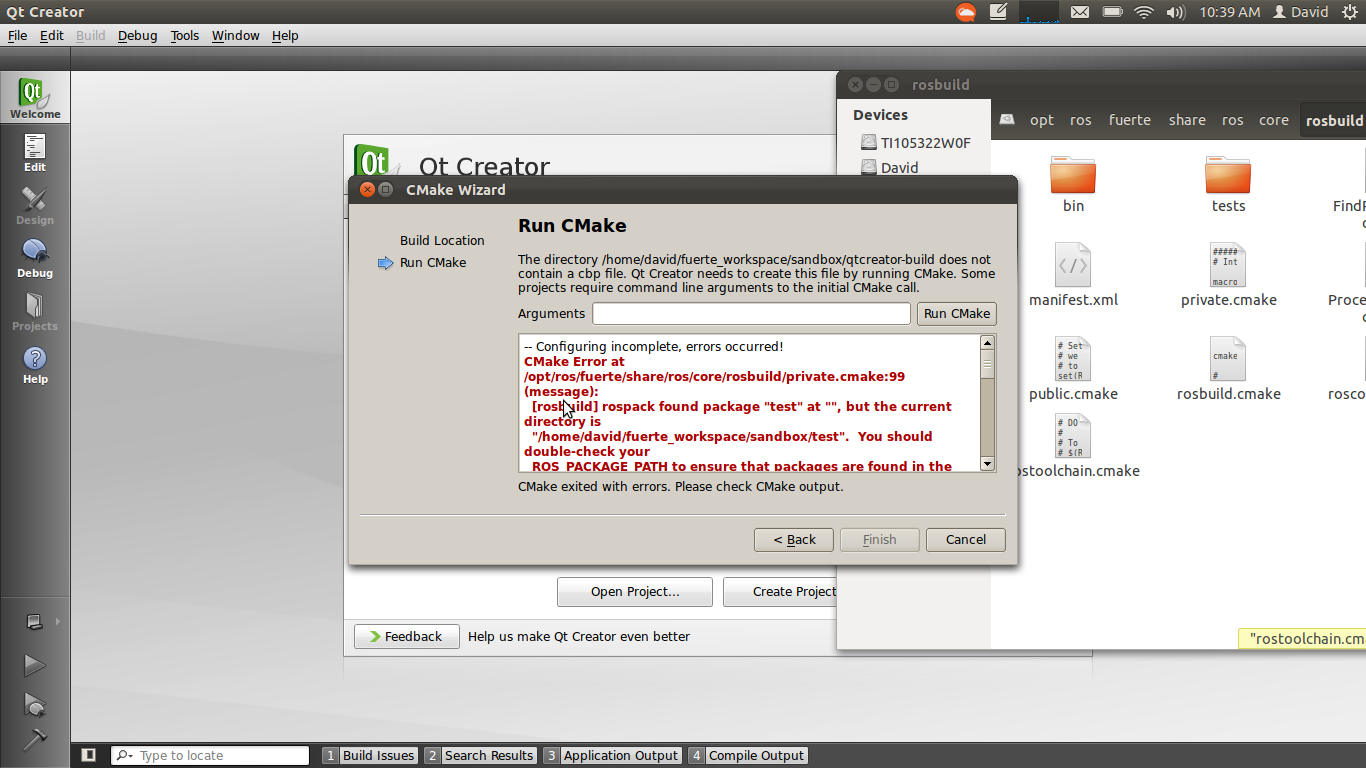
- I clicked on Run CMake, and this is what I got:
-- Configuring incomplete, errors occurred! CMake Error at /opt/ros/fuerte/share/ros/core/rosbuild/private.cmake:99 (message): [rosbuild] rospack found package "test" at "", but the current directory is "/home/david/fuerte_workspace/sandbox/test". You should double-check your ROS_PACKAGE_PATH to ensure that packages are found in the correct precedence order. Call Stack (most recent call first): /opt/ros/fuerte/share/ros/core/rosbuild/public.cmake:177 (_rosbuild_check_package_location) CMakeLists.txt:12 (rosbuild_init)
[rosbuild] Building package test -- Found PythonInterp: /usr/bin/python2.7 -- Detecting CXX compiler ABI info - done -- Detecting CXX compiler ABI info -- Check for working CXX compiler: /usr/bin/c++ -- works -- Check for working CXX compiler: /usr/bin/c++ -- Detecting C compiler ABI info - done -- Detecting C compiler ABI info -- Check for working C compiler: /usr/bin/gcc -- works -- Check for working C compiler: /usr/bin/gcc -- The CXX compiler identification is GNU -- The C compiler identification is GNU
I don't have a lot of experience with this, I will appreciate an easy-to-understand explanation if possible.
Thanks in advance!!

