
Weird situation with kinect mounted on PR2

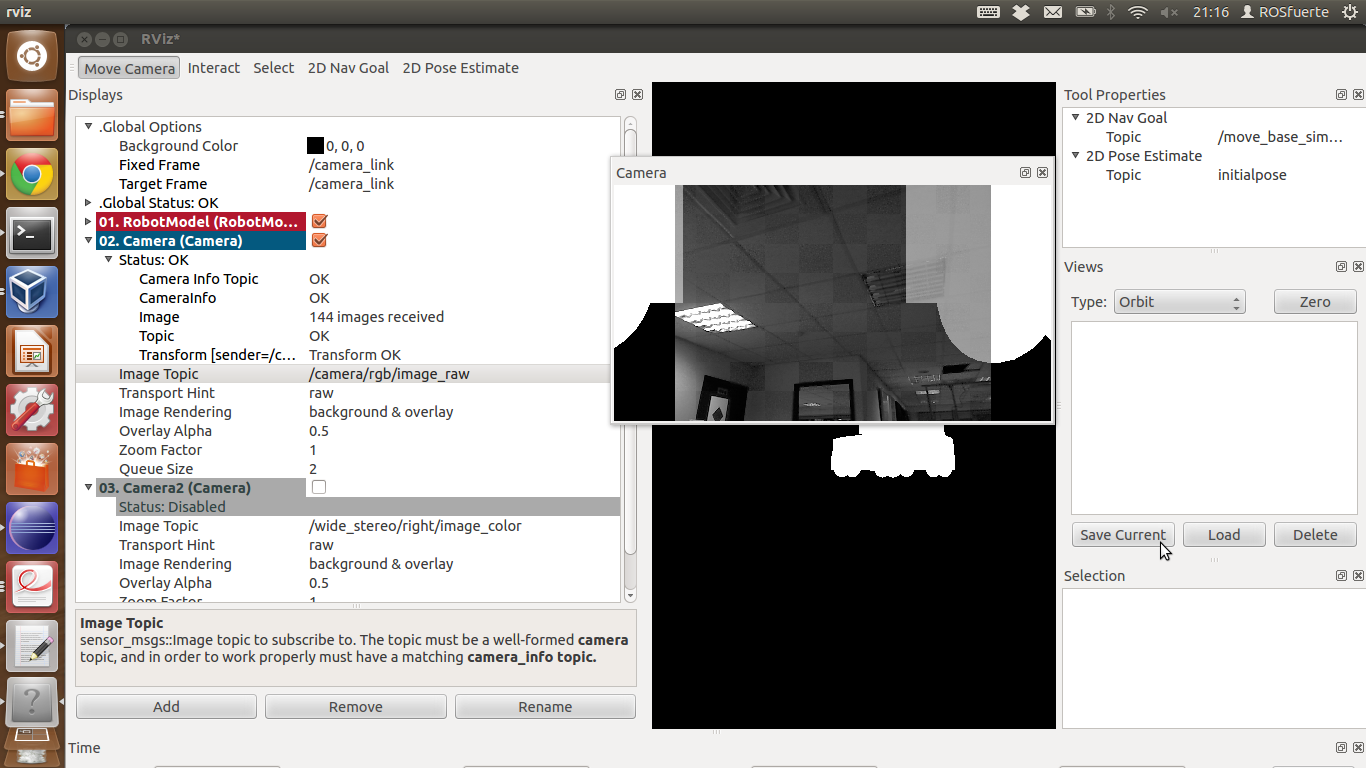
I use rviz to visualize the image kinect (mounted on PR2) captured, but I found there exists a weird white region, is this a normal situation? If not, does anyone know how to deal with this problem?
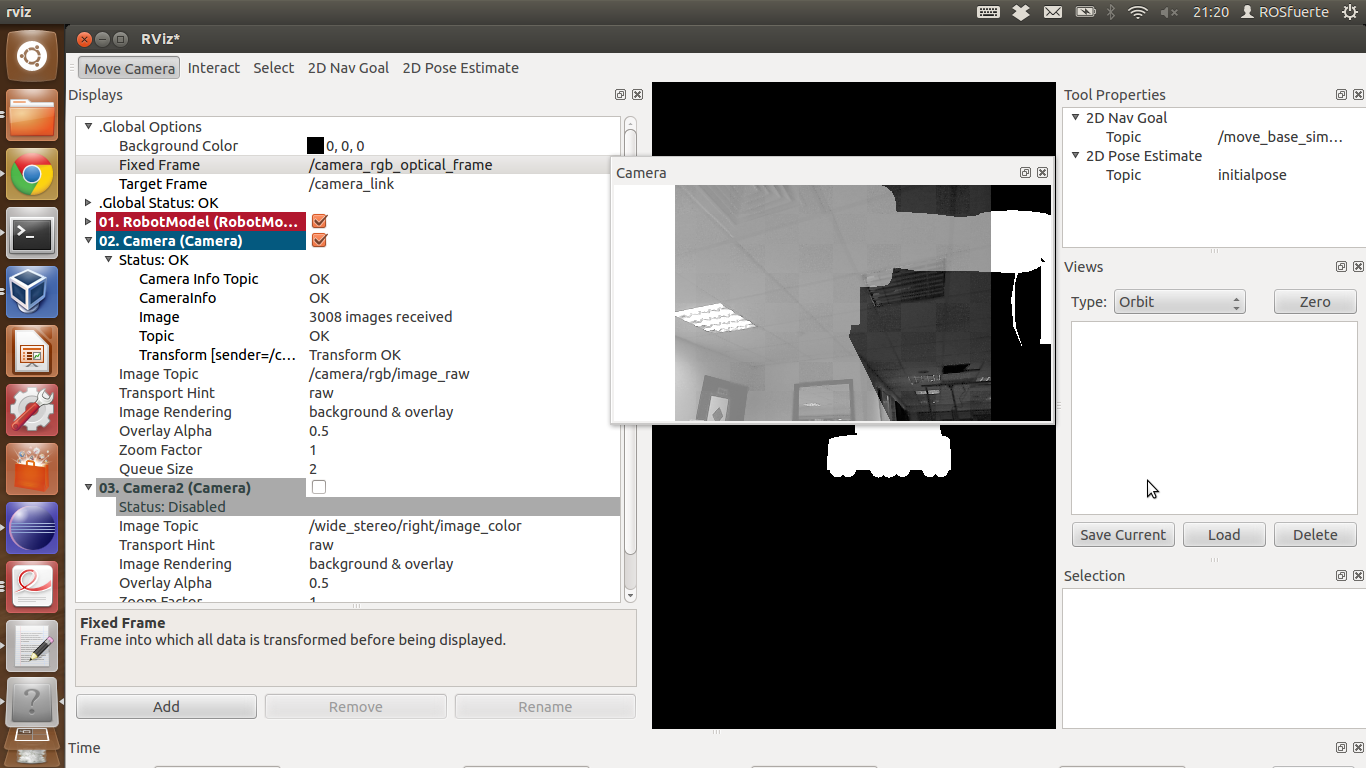
And I also want to ask what's the appropriate Fixed Frame & Target Frame to choose?
When I change the Fixed Frame, it became weirder.
Thanks in advance.
add a comment

