
problem building my map using SLAM
I was trying to build my environment map using SLAM from this Building a map with SLAMturtorial using my icreate base + kinect and yesterday at after many trials i got this picture and got (my_map.pgm & my_map.yaml) :-

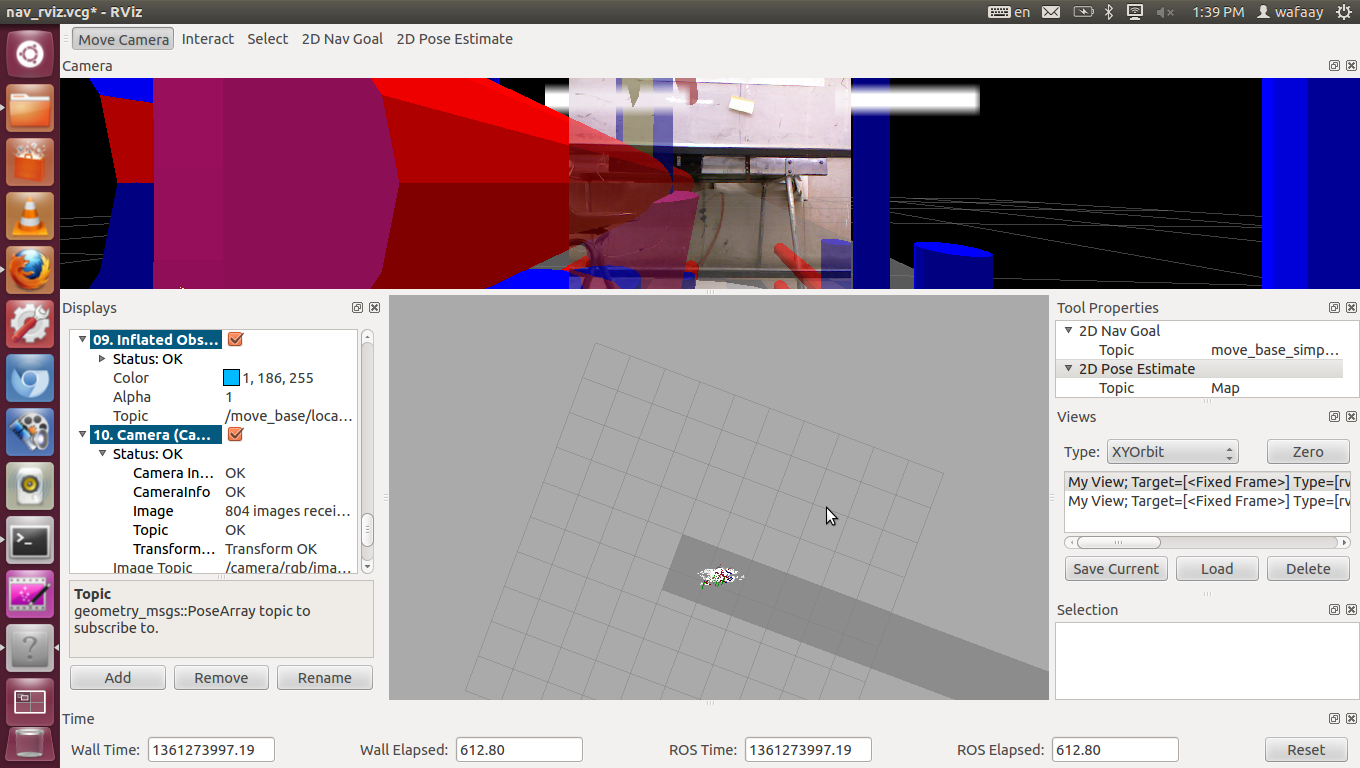
and when i closed and tried to build another one from the beginning i didn't get any map i've tried many times but without any new results i always get this empty view on rviz :-
without building my map on rviz ..so is there any tips about what may went wrong with me ?...thanks in advance
i have added a video of my work :-
this video is from my workstation :- Workstation Rviz interface
add a comment



