
Laser scan to point cloud to octomap - strange result


Hi,
I have a laser scanner mounted on an arm. With laser_pipeline and pcl_assembler, I build a point cloud and pass it to the octomap_server. The pcl_assembler runs every 3 seconds.
My problem is, in simulation and Gazebo all works fine.
But on the real system, the octomap is completely wrong.
What could be the problem here, or is there anything that works better?
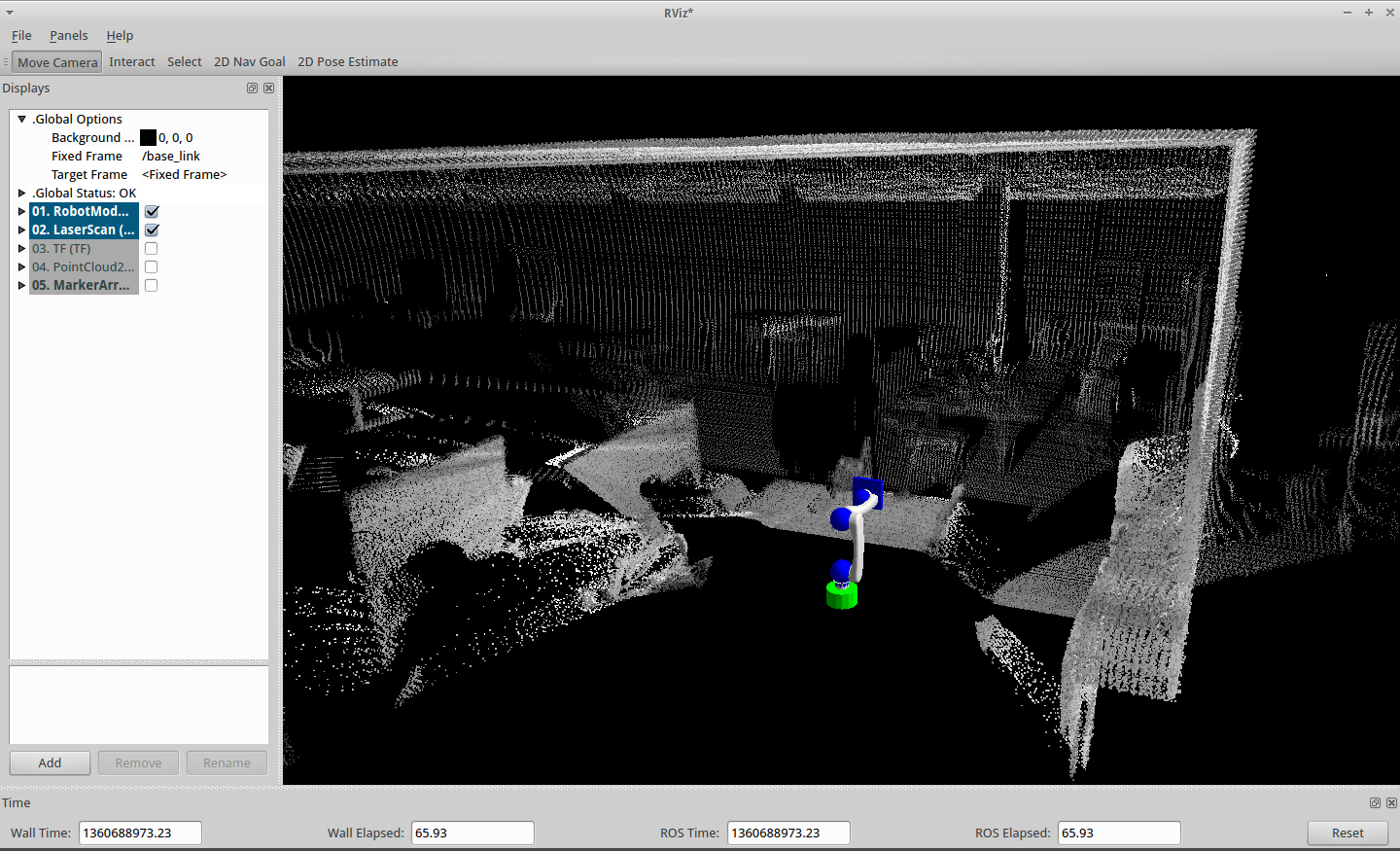
Made 2 screenshots, first is just the laser scans, looks great. TF should also be ok.
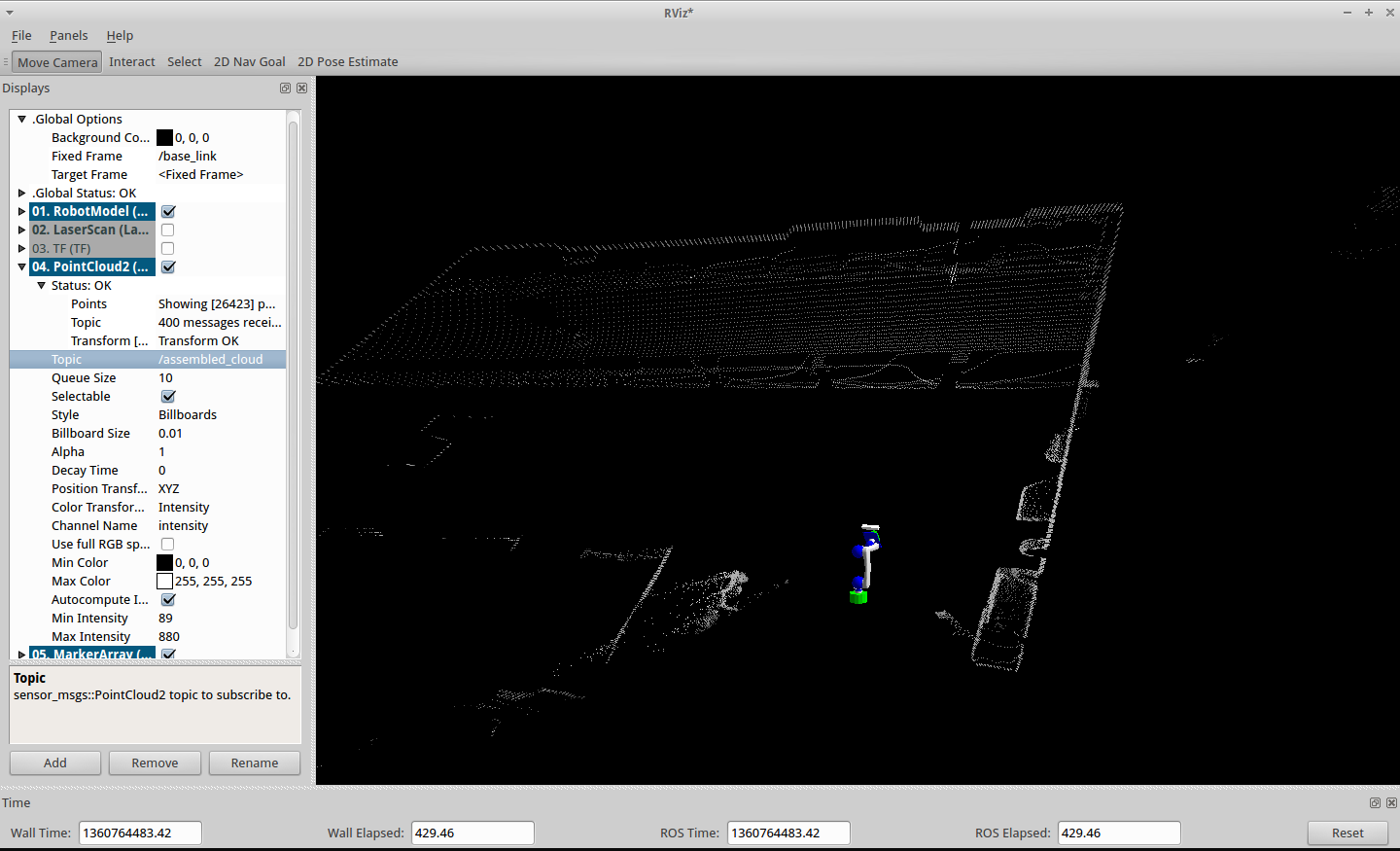
The 2nd one is the assembled_cloud.
The 3rd one is the octomap.

<?xml version="1.0"?>
<launch>
<include file="$(find powerball_peak_start)/launch/powerball.launch" />
<!--<include file="$(find powerball_vscom_start)/launch/powerball.launch" />-->
<!-- Laser Scanner -->
<node ns="LMS100" name="lms100" pkg="LMS1xx" type="LMS100" >
<param name="host" value="192.168.5.80"/>
<param name="frame_id" value="/laser_link"/>
</node>
<!-- Laser Pipeline -->
<node type="laser_scan_assembler" pkg="laser_assembler" name="my_assembler">
<remap from="scan" to="/LMS100/scan"/>
<param name="max_scans" type="int" value="400" />
<param name="fixed_frame" type="string" value="/laser_link" />
</node>
<!-- Point cloud publisher -->
<node name="periodic_snapshotter" pkg="pcl_assembler" type="periodic_snapshotter" respawn="false" output="screen" />
<!-- Octomap Server -->
<node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<param name="resolution" value="0.05" />
<param name="frame_id" type="string" value="base_link" />
<param name="max_sensor_range" value="20.0" />
<param name="latch" value="false" />
<remap from="cloud_in" to="assembled_cloud" />
</node>
<!-- Rviz -->
<node name="rviz" pkg="rviz" type="rviz" respawn="false" output="screen" />
</launch>

Which version of octomap_server is that, and which ROS distribution?
Also: What does the assembled PointCloud2 look like in the fixed frame "base_link"?
I am on fuerte and the octomap version is 1.4.3-0precise. Added a l of the PointCloud2.
What is the version of octomap_mapping (ros-fuerte-octomap-mapping)? I ask since there was a bug that could have caused this, but that got fixed some time ago. The current version should be 0.4.5 or 0.4.6.
octomap_point_cloud_centers will essentially show the same as the MarkerArray, without the spatial extents. What would help would be to see
assembled_cloudin thebase_linkframe, since that is what gets inserted into the octomap.Ok, I think the problem is the assembled_cloud. It doesn't look like a Point Cloud, it's just 3D data mapped to 2D data. But why is this working in simulation?
@AHornung, so, how do I improve the result of the octomap?