
How to get a Valid Depth Image? [closed]
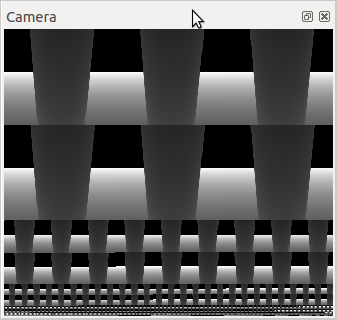
So I'm trying to get a valid depth image from the simulated kinect and I am getting the following depth image,
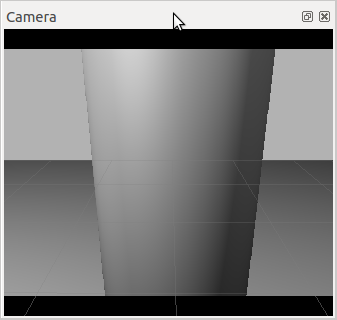
when the RGB Image looks like this,
I see there is a similar problem in a previous question here, but I've applied the patch and I am still getting this image. I think this maybe because I am using ROS Fuerte with gazebo 1.0.2, I tried upgrading but it turned into more of a hassle than I expected to get this gazebo world/robot up and running again.
Any ideas on how to fix this? or any other sensors that give valid depth images?
Any help would be greatly appreciated!
Closed for the following reason
question is not relevant or outdated by
tfoote
close date 2015-10-14 16:11:55.093866
add a comment
