
AMCL map->odom tf-transformation
Hi everybody
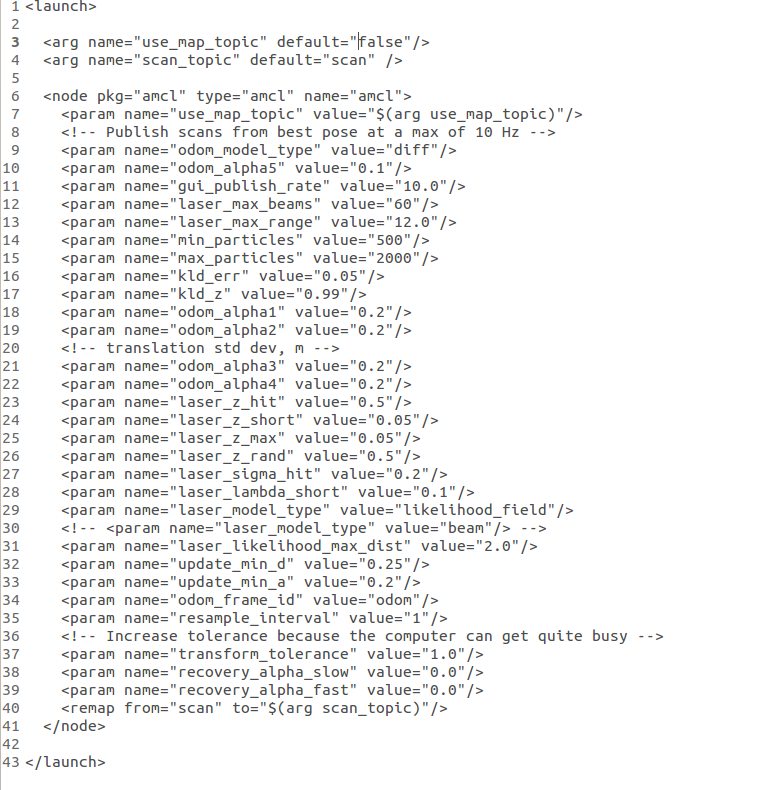
I have a question regarding the tf transformation which is published by amcl. I'm working with a husky so i use the amcl_demo.launch file to start amcl.
I build an tf tree for my lasescanner and the odometry of the robot.
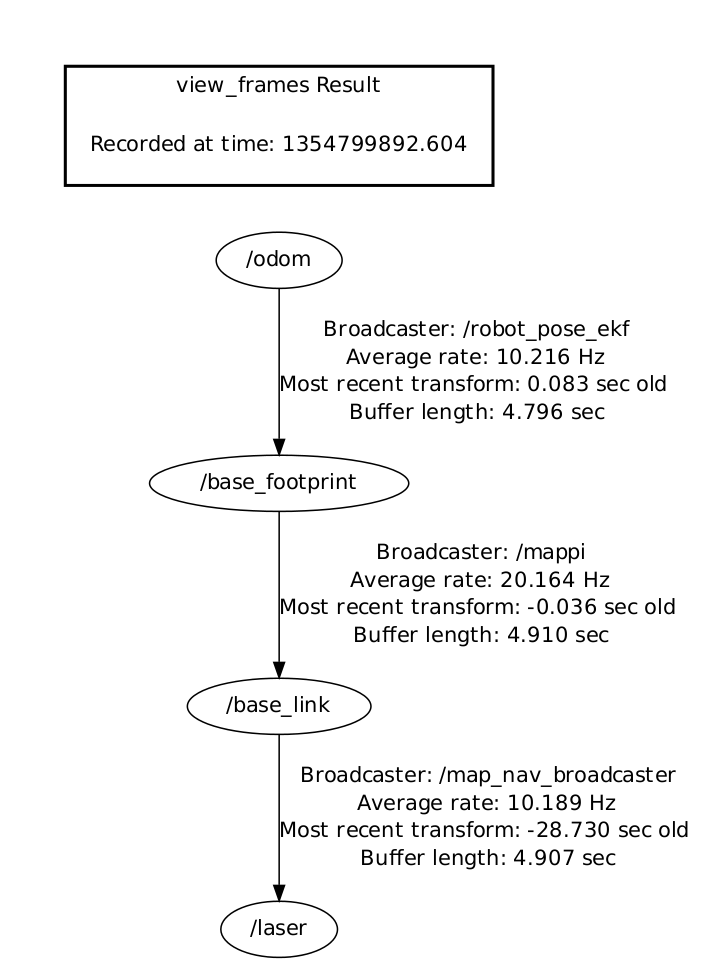
I'm using 2 static broadcaster for the transformations base_footprint->base_link->laser
robot_pose is publishing the transform odom -> base_footprint
My problem is: If i start amcl it is not publishing the transform from map->odom. I'm getting the warning "Waiting on transform from /base_link to /map to become available before running costmap, tf error:" So in my understanding amcl should provide the missing transform map->odom to finish the tf tree. So why is it waiting for a transform between base_link and map?
Hoping for some help


Hey Tirgo, i got the same problem. Would you like to tell how to solve the problem?