
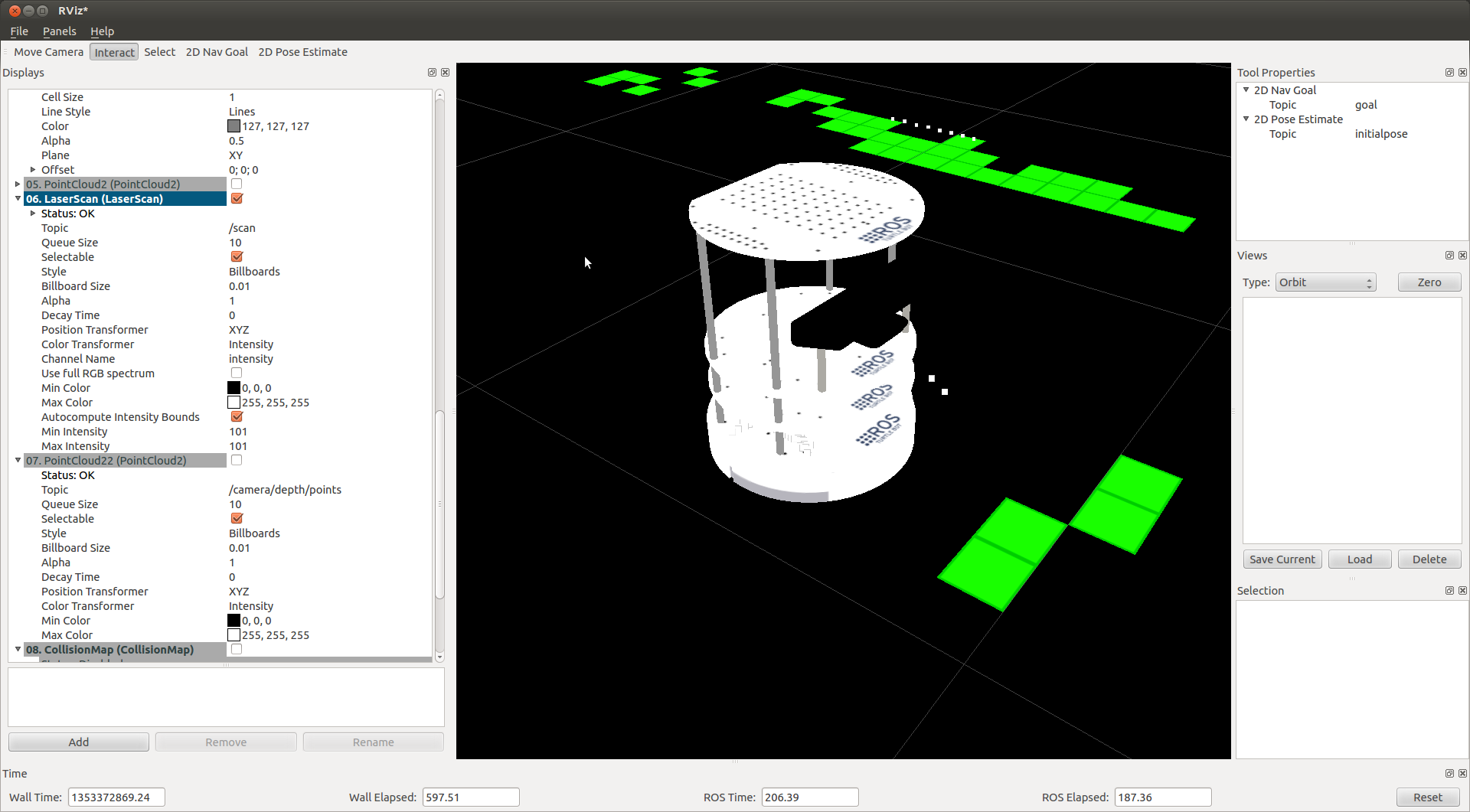
Turltebot laser striking frame in gazebo simulation

I'm currently experimenting with navigation for a simulated turtlebot using the turtlebot_navigation package. I was having trouble getting a stable position estimate when I noticed that the simulated LIDAR appears to be striking the frame of the robot which appears to be interefering with the pose estimate generated by the amcl package. I have modified the minimum range of the laser to 0.3m, but this does seem to be a temporary solution.
Should the simulated sensor be moved so that is does not strike the frame, or is there a method for directing the navigation system to ignore LIDAR returns that do not meet specific criteria?
add a comment

