
turtle tf tutorial fails to work

Hi all,
I am fairly new to ros and was going through the tf tutorials and stumbled upon a strange error. After fiddling around for an hour or so I'm still not able to understand the behavior. I'm doing everything exactly as stated in these tutorials, using C++. The code is exactly as stated there. I'm on fuerte, and ubuntu 12.04.
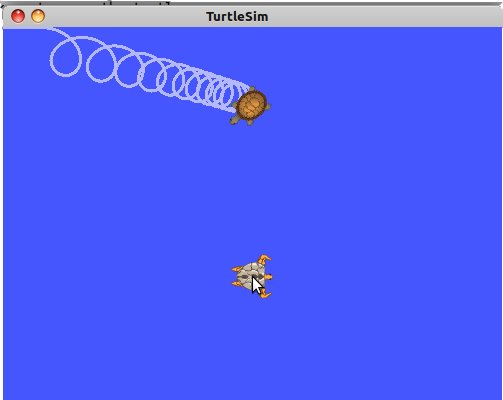
The problem is that the second turtle goes in circles instead of approaching the first one. The broadcaster works well, so, I would guess, that the issue is in the listener in the "lookupTransform" method. In the end the angular speed appears to be wrong.
I also attach the image of how the turtle moves. This happens on 2 different machines of the same configuration with fresh ros-fuerte installed.
Any ideas what could explain such a behavior?
