
roboearth detection and other issues
Hello everyone,
I am a newbie roboearth user and have recently managed to integrate roboearth with ros, resolving some build and run-time errors.
- I start training roboearth with a bottle. The first problem I encounter is that I couldn't see any points on the screen (i.e.re_object_recorder does not receive any point clouds) when I enable depth-registration. On the contrary, I can see the points when I disable depth-registration. Here are two screenshots:
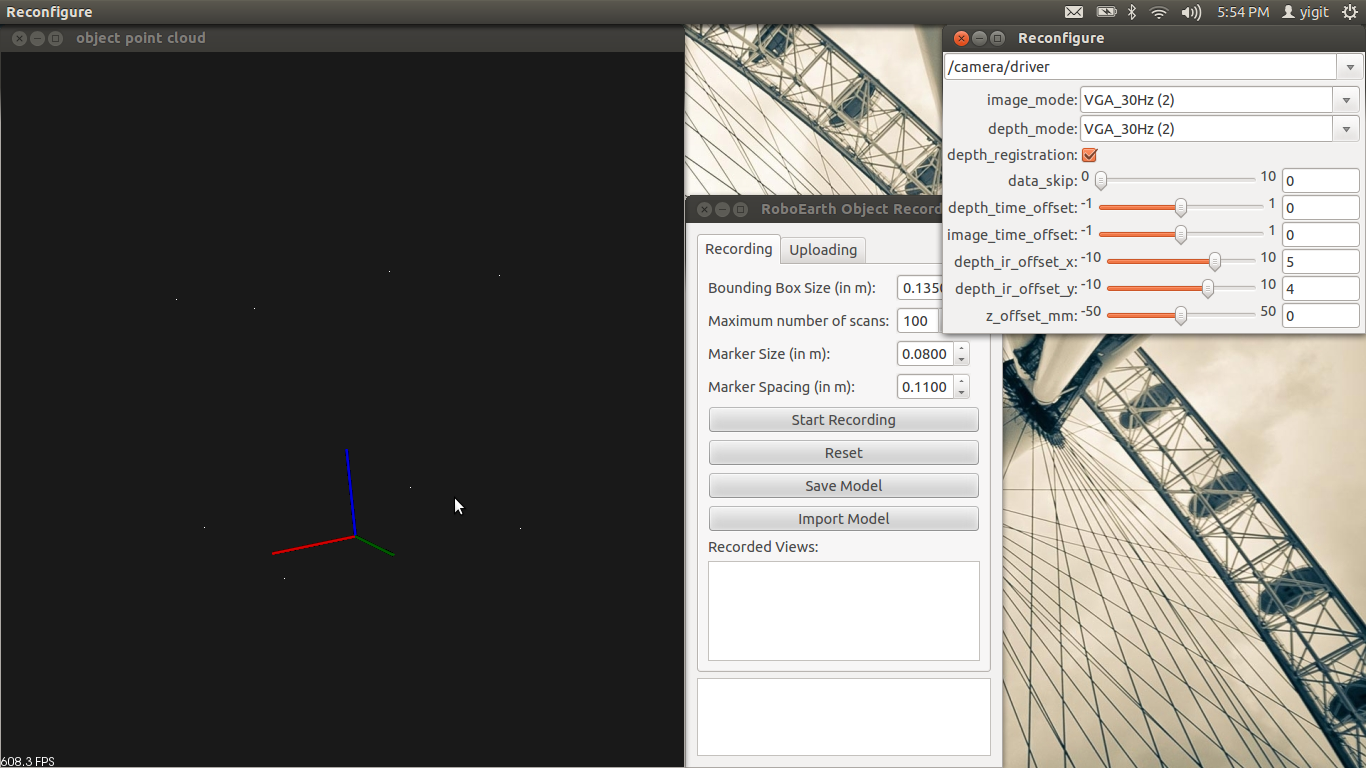
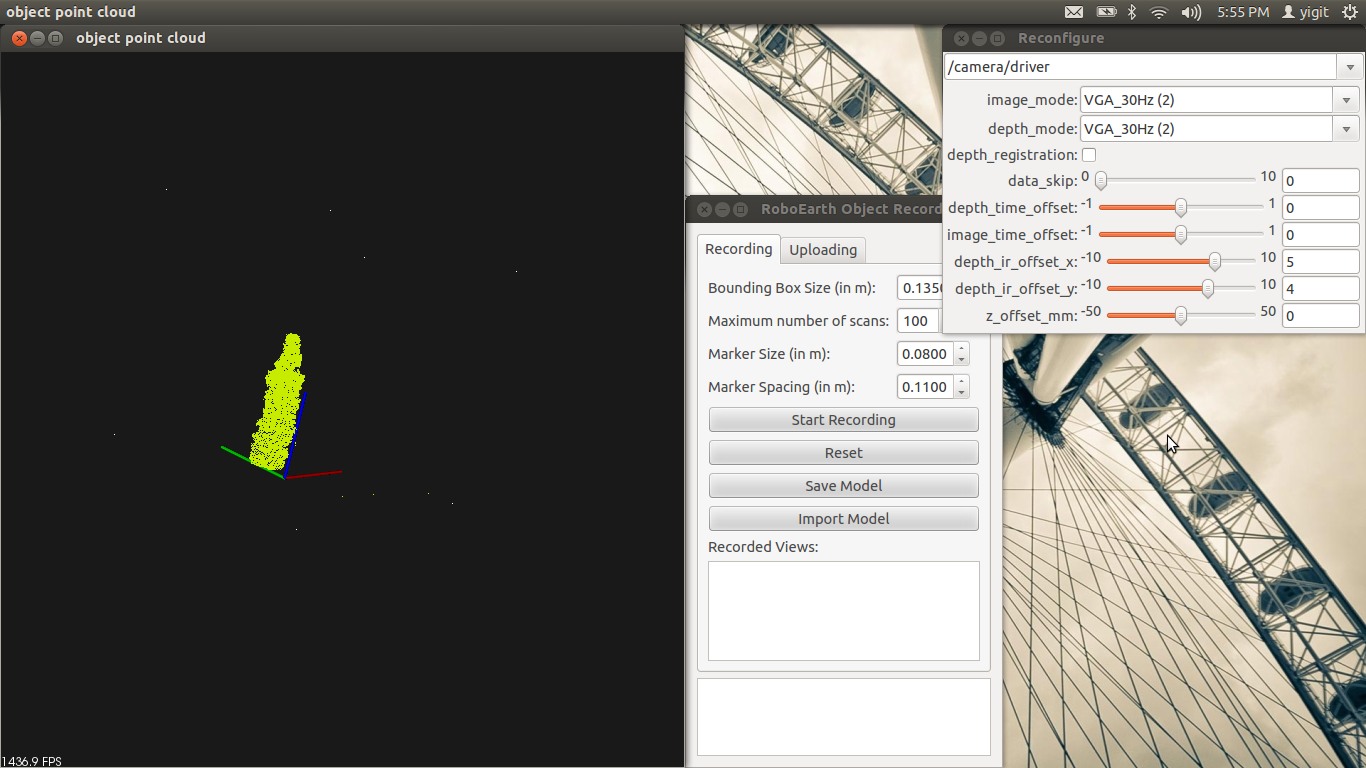
- I continue training with disabling depth-registration even if it explicitly stated otherwise. After training finishes, I upload my model to roboearth, everything seems fine up to this point. Then, I try to detect the bottle as it shown in the ros tutorials. I start openni (again, I disable depth-registration for the same reason) and other nodes (re_kinect_object_detector etc...). I download my object, and roboearth just doesn't recognize the bottle.
There is this hint in the tutorial page, which I really take into account. I believe my model is dense enough (you can search my model through roboearth api, it is called bottle.screensaversolution).
So, what might have gone wrong?
Thanks in advance.
add a comment
