
Odometry strange behavior [closed]

Hallo.
I have problems with odometry publishing over ROS.
I calculate and publish wheel odometry of my car-like robot model in gazebo this way:
#include "pr2_mechanism_model/joint.h"
//#include "pr2_controller_interface/controller.h"
#include "nav_msgs/Odometry.h"
#include "sensor_msgs/JointState.h"
#include "tf/transform_broadcaster.h"
#include "ros/ros.h"
#include "math.h"
double delta_x = 0;
double delta_y = 0;
double delta_a1 = 0;
double delta_a2 = 0;
double fi = 0;
double current_fi = 0;
double last_x = 0;
double last_y = 0;
double current_a1, current_a2;
double last_a1 = 0;
double last_a2 = 0;
void OdomCallback(const sensor_msgs::JointState::ConstPtr& msg)
{
// Getting the positions of right and left back wheels from /joint_states topic
current_a1 = msg->position[4];
current_a2 = msg->position[5];
}
int main (int argc, char** argv)
{
ros::init(argc, argv, "odom_publisher");
ros::NodeHandle n;
ros::Publisher odom_pub;
ros::Subscriber odom_sub;
odom_sub = n.subscribe("/joint_states",1000,OdomCallback);
odom_pub = n.advertise<nav_msgs::Odometry>("odom",100);
tf::TransformBroadcaster odom_broadcaster;
ros::Rate r(1.0);
ros::Time current_time, last_time;
current_time = ros::Time::now();
last_time = ros::Time::now();
double R = 0.07; //wheel radius
double d = 0.3; //distance between two wheels
double x = 0; //initial values
double y = 0;
double th = 0;
double vx, vy, vth;
int count = 0;
while(n.ok())
{
ros::spinOnce(); // check for incoming messages
current_time = ros::Time::now();
delta_a1 = current_a1 - last_a1;
delta_a2 = current_a2 - last_a2;
last_a1 = current_a1;
last_a2 = current_a2;
//ROS_INFO("delta_a %f", delta_a);
double dt = (current_time - last_time).toSec();
current_fi = -R*(delta_a2 - delta_a1)/d;
fi +=current_fi;
current_fi = 0;
ROS_INFO("yaw %f", fi);
delta_x = R*delta_a1*cos(fi);
delta_y = R*delta_a1*sin(fi);
x += delta_x;
y += delta_y;
th = fi;
vx = delta_x/dt;
vy = delta_y/dt;
vth = current_fi/dt;
//since all odometry is 6DOF we'll need a quaternion created from yaw
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
//first, we'll publish the transform over tf
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link";
odom_trans.transform.translation.x = -x;
odom_trans.transform.translation.y = -y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
//send the transform
odom_broadcaster.sendTransform(odom_trans);
//next, we'll publish the odometry message over ROS
nav_msgs::Odometry odom;
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
//set the position
odom.pose.pose.position.x = -x;
odom.pose.pose.position.y = -y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
//set the velocity
odom.child_frame_id = "base_link";
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
//publish the message
odom_pub.publish(odom);
last_time = current_time;
r.sleep();
count++;
}
return 0;
}
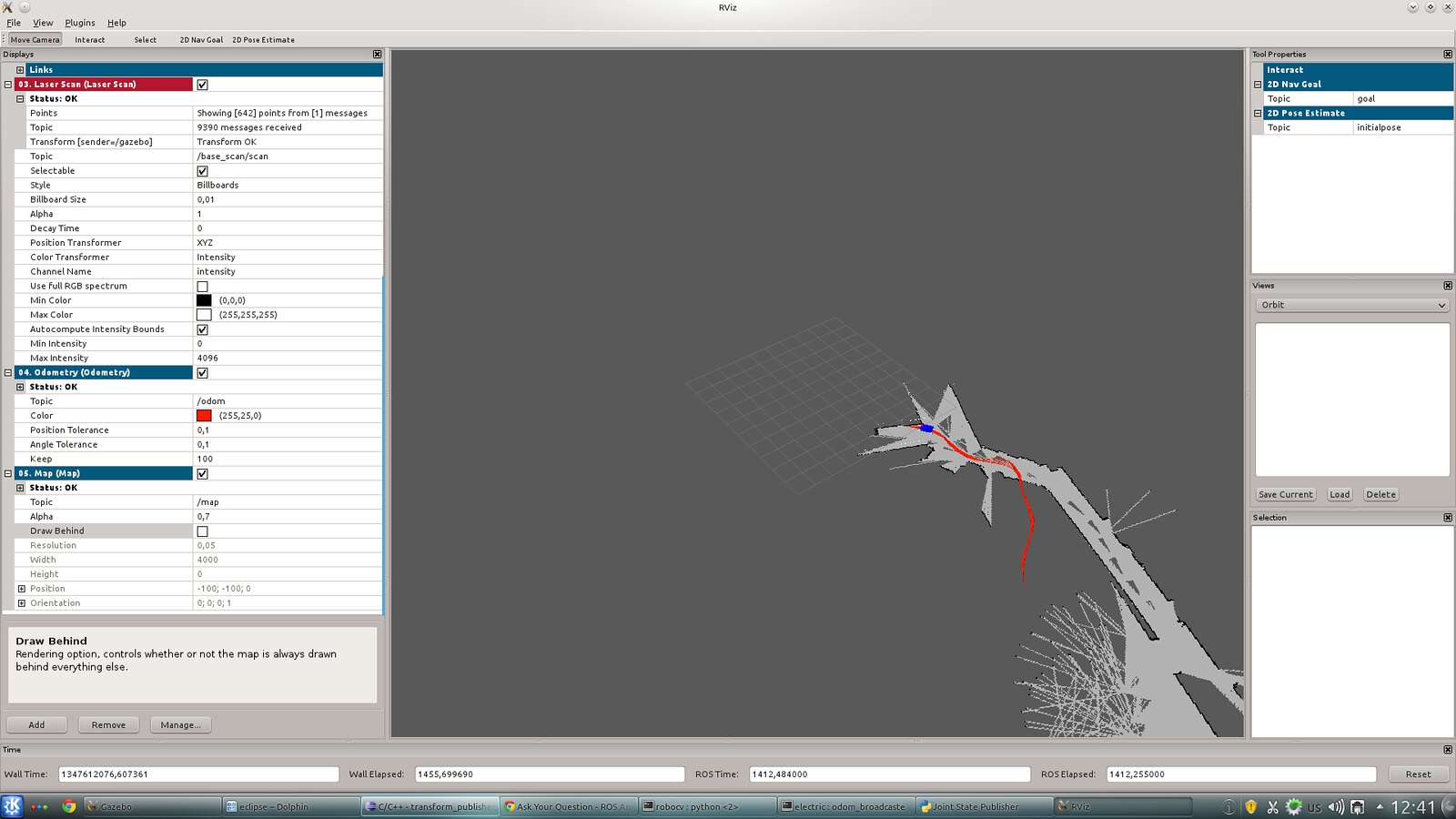
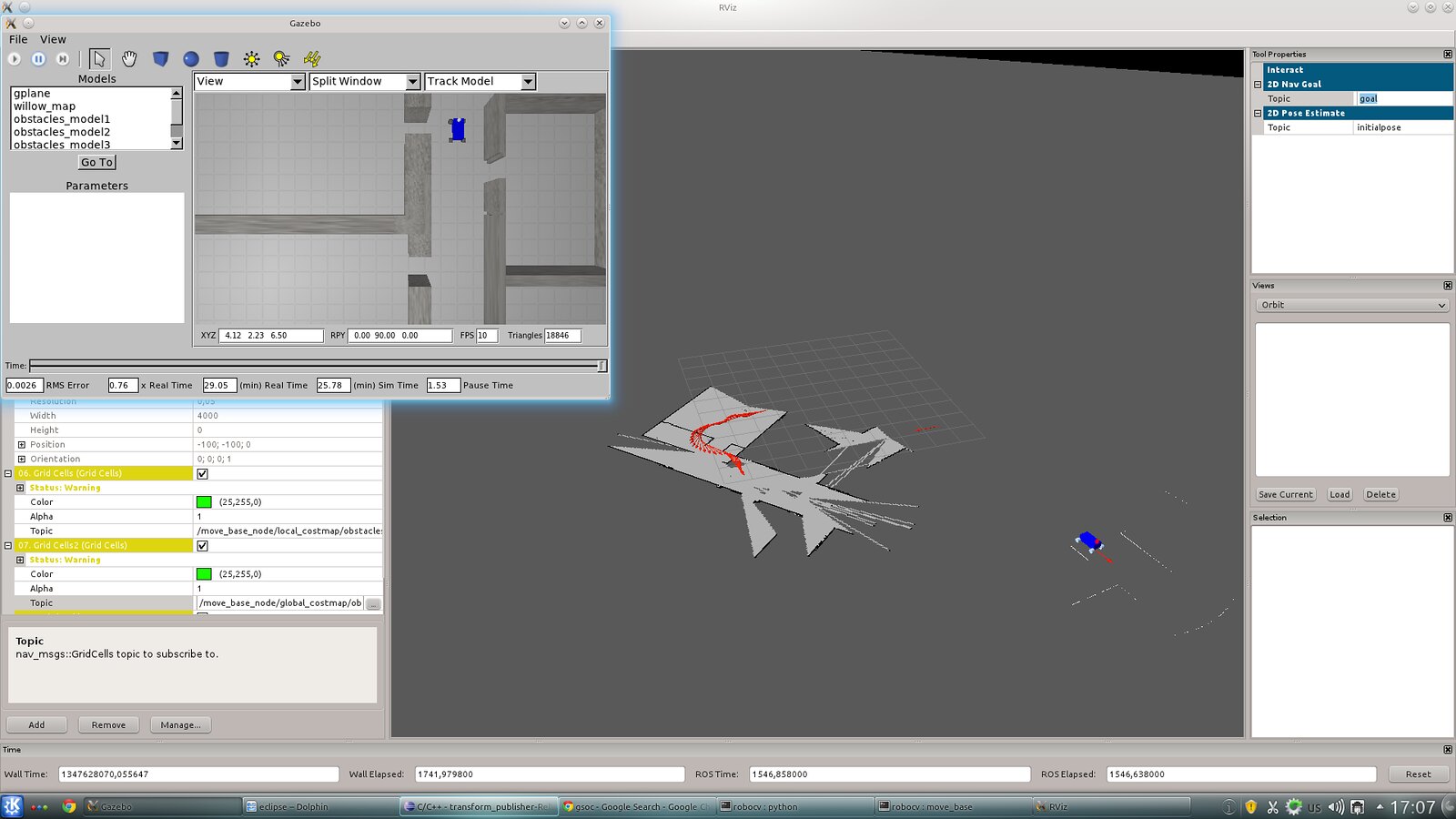
When I driving in Gazebo it works nice and I get quite adequate coordinates and yaw. But if I'm trying to drive (teleoperating) in RViz with gmapping (or without it) and mark /odom as a fixed frame my model starts to move back and forward and sometimes front. And odometry shows weird values, which change even if my robot does not move. Here are snapshots:
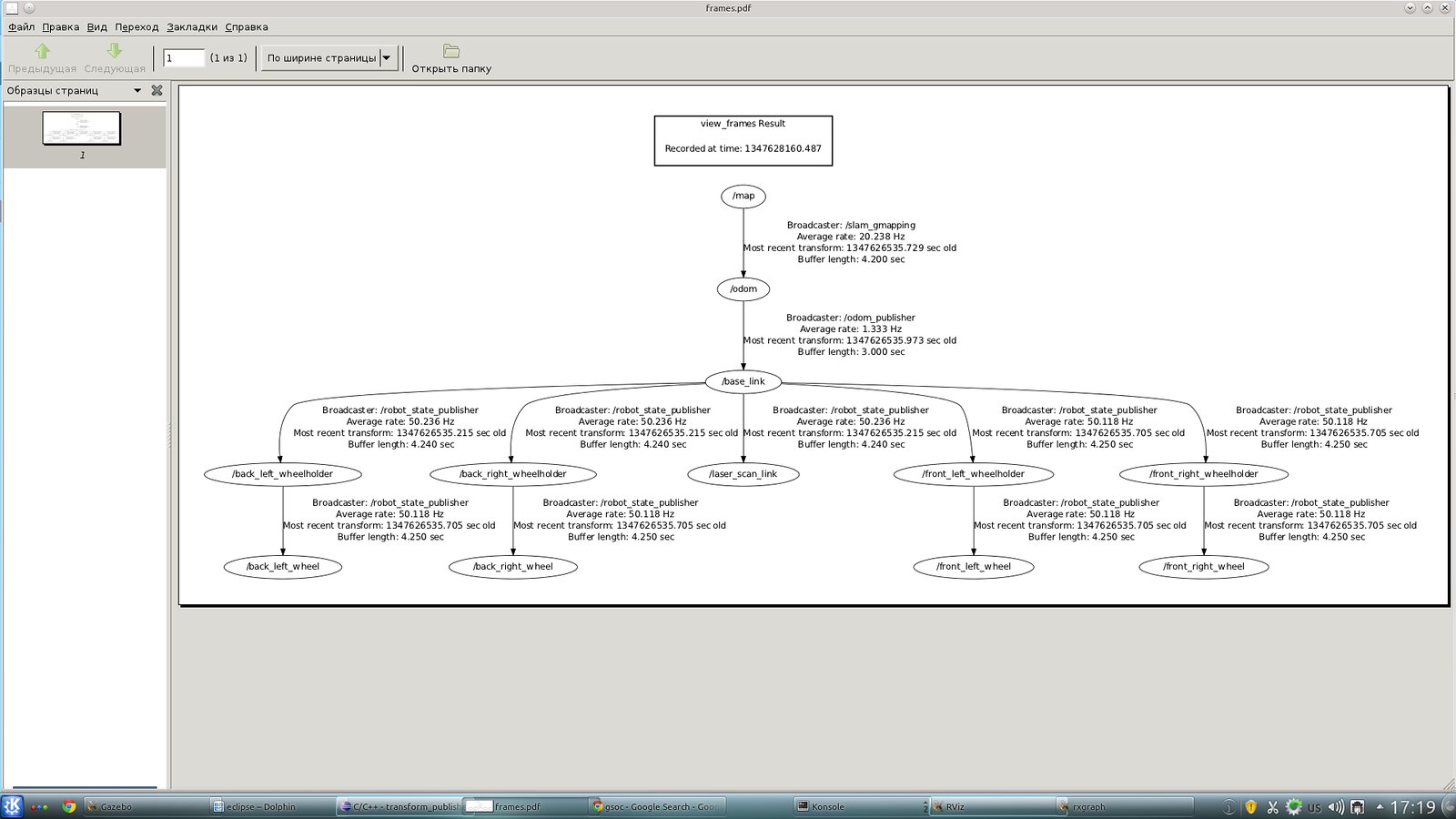
Also I have these errors in RViz:
For Frame [laser_scan_link]: No tranform to fixed frame [odom].
When ...

A rate of 1 Hz is definitely too low. Did you try other rates? I guess 20-50Hz should be a better choice.
The things go even worse when I increase publishing rate/
Now I artificially cut bad values with a filter. But it still loses the map from time to time.