arm_navigation generation always in collision for Robonaut?
I tried to run the Robonaut2 URDF through the arm_navigation generation tutorial, but it looks like the end-effector is always in collision, and thus i can not generate plans using the planning_components_visualizer.
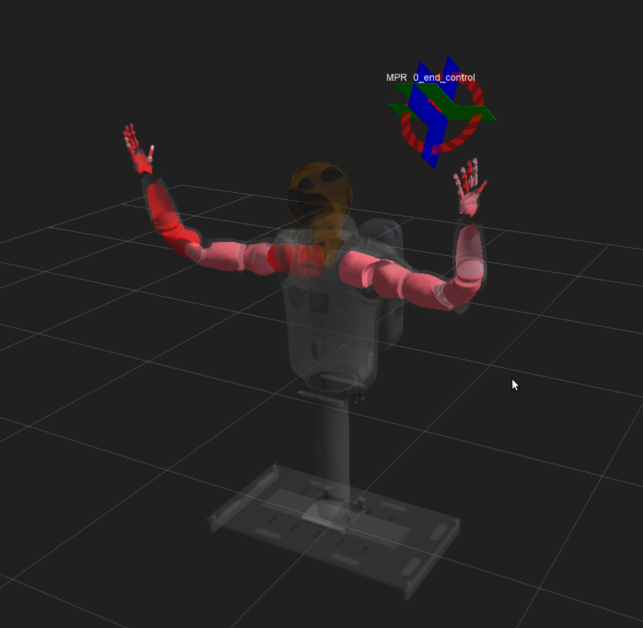
This is my guess of what's happening based on the end-effector being red upon start up:
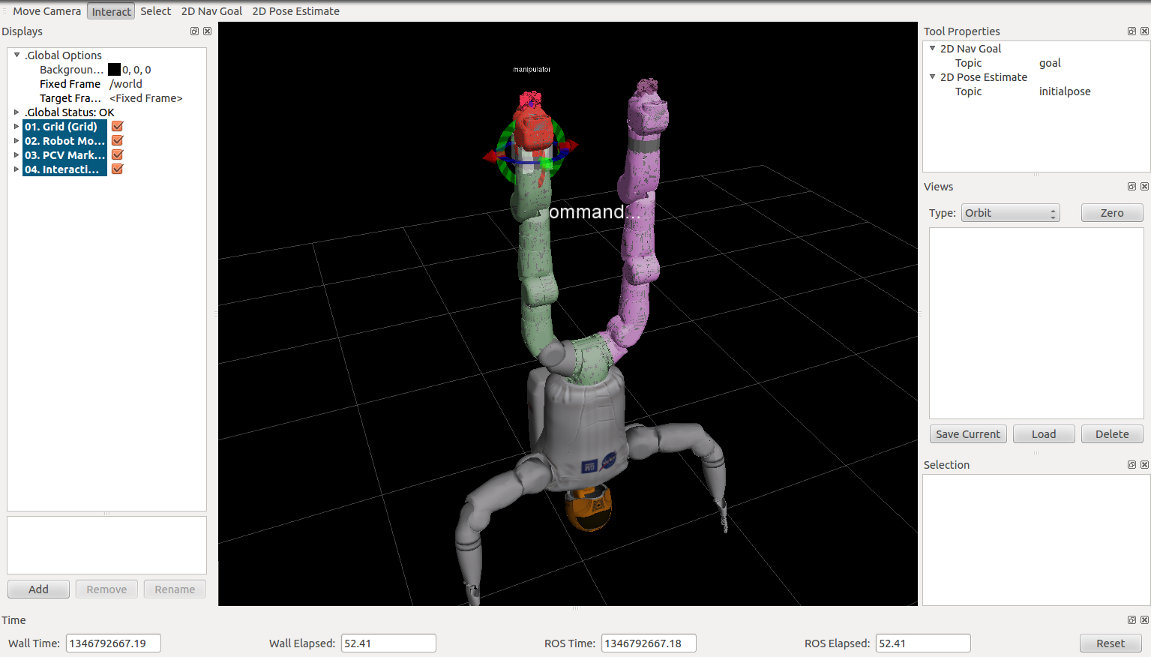
and complete inactivity when telling it to "plan" from the menu.
I am using the nasa_r2_common\r2_description\robots\r2c_full_body.urdf.xacro URDF, and choosing the left leg as the 'manipulator' though this seems to work regardless of which of the four limbs i choose.
Is there something i need to check/verify in the advanced wizard to make sure my description is valid?
FYI, I was hoping to push through with the warehouse and motion planning stacks, once I get this working....
Thanks, Steve