
how does octomap realize the height of different place?
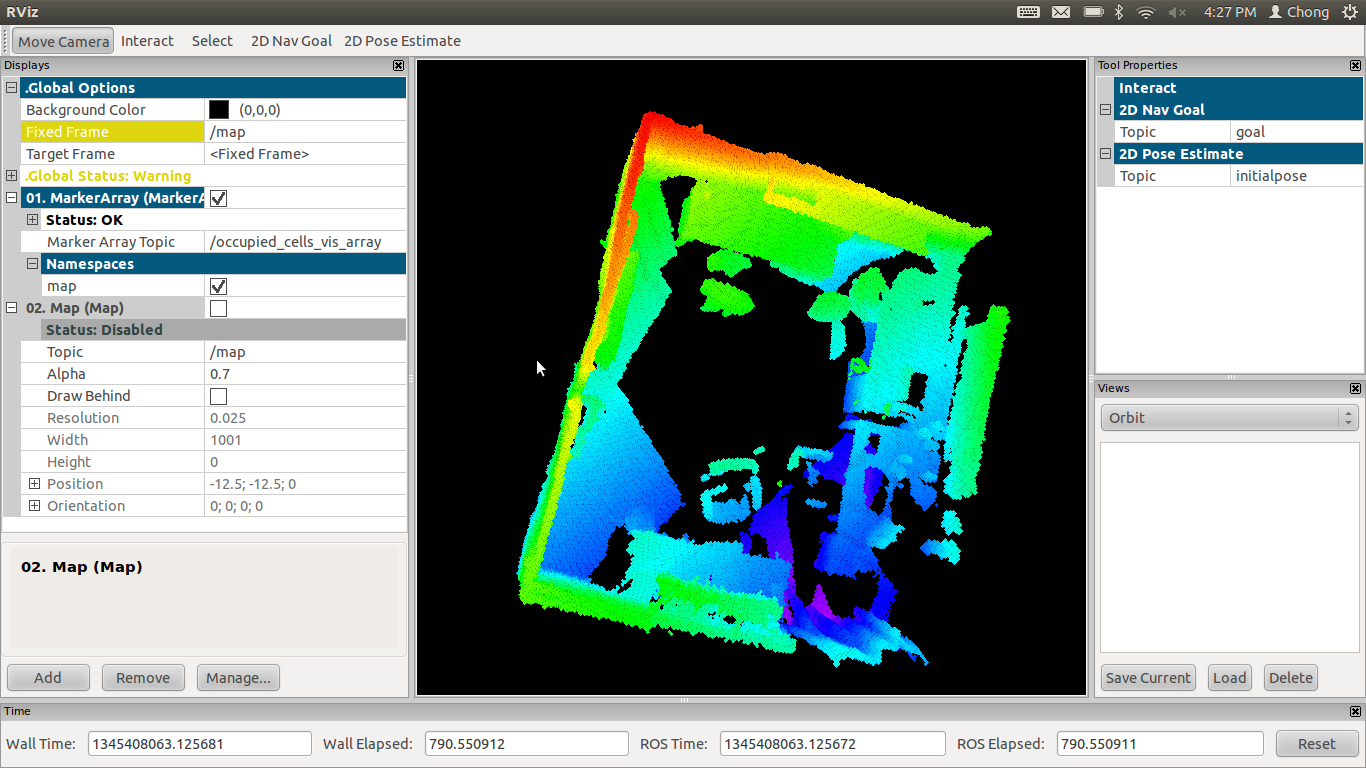
Hi Everyone, I'm using rgbdslam to generate a 3D map and send it to octomap for further processing. But now I found a problem I cannot solve: I'm generating the map of an office but according to octomap, it seems to determine to make my room very declined, As seen from the image I attach, if the same color represents the same height. I have no clue how it happens. Can anyone have any ideas? Thanks a lot !
Chong



Please add the proper tags to your question next time, so it can be found and answered.