
Moveit Task Constructor Python Wrapper Issue
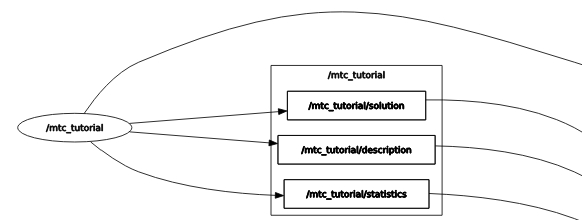
I am using ROS noetic on ubuntu 20.04 with MoveIt and MoveIt Task Constructor Framework. If I run one of the mtc tutorial examples from MTC Tutorial the mtc solution topic and node is not of type anonymous, as you can see in the attached image:
roslaunch moveit_task_constructor_demo demo.launch
rosrun moveit_task_constructor_demo cartesian
If I use the python API (wrapper C++ class) the mtc node and topic is anonymous and can't be renamed or remapped:
roslaunch moveit_task_constructor_demo demo.launch
rosrun moveit_task_constructor_demo cartesian.py __ns:=mtc_tutorial

Does anybody know a solution for that or do I misunderstand how it works? Thanks in advance
add a comment
