
Loop closure failing in GMapping SLAM on turtlebot3
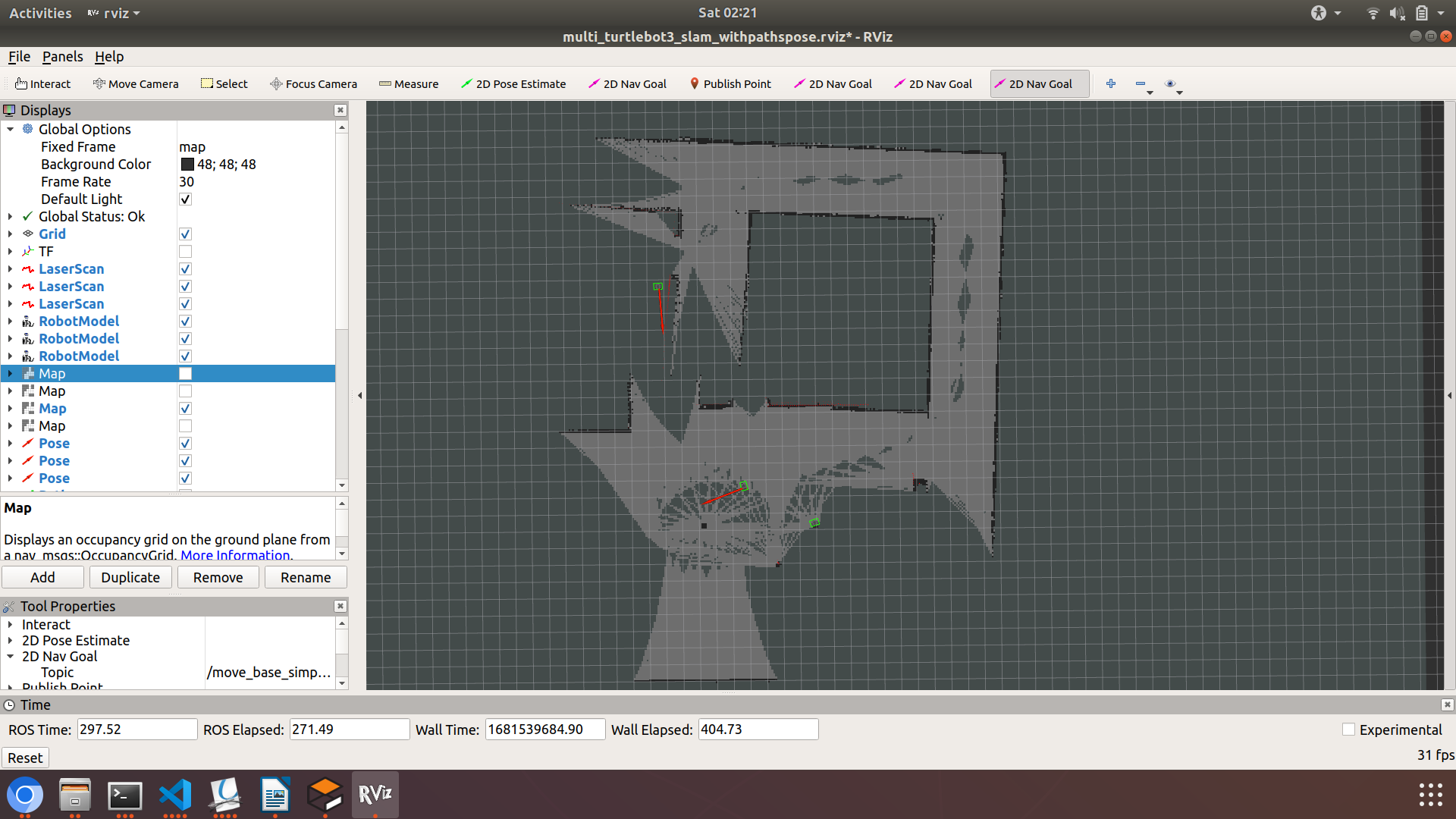
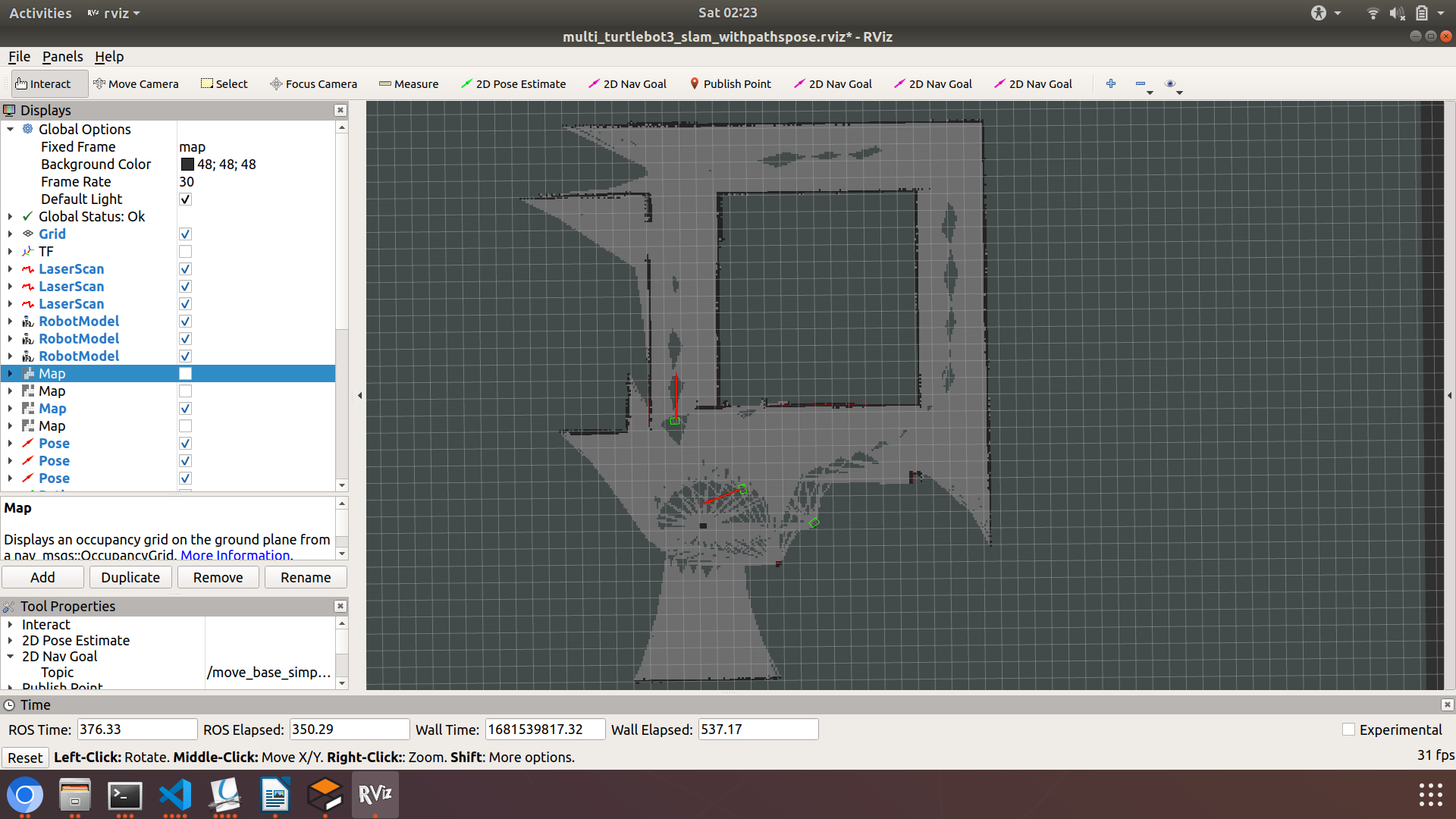
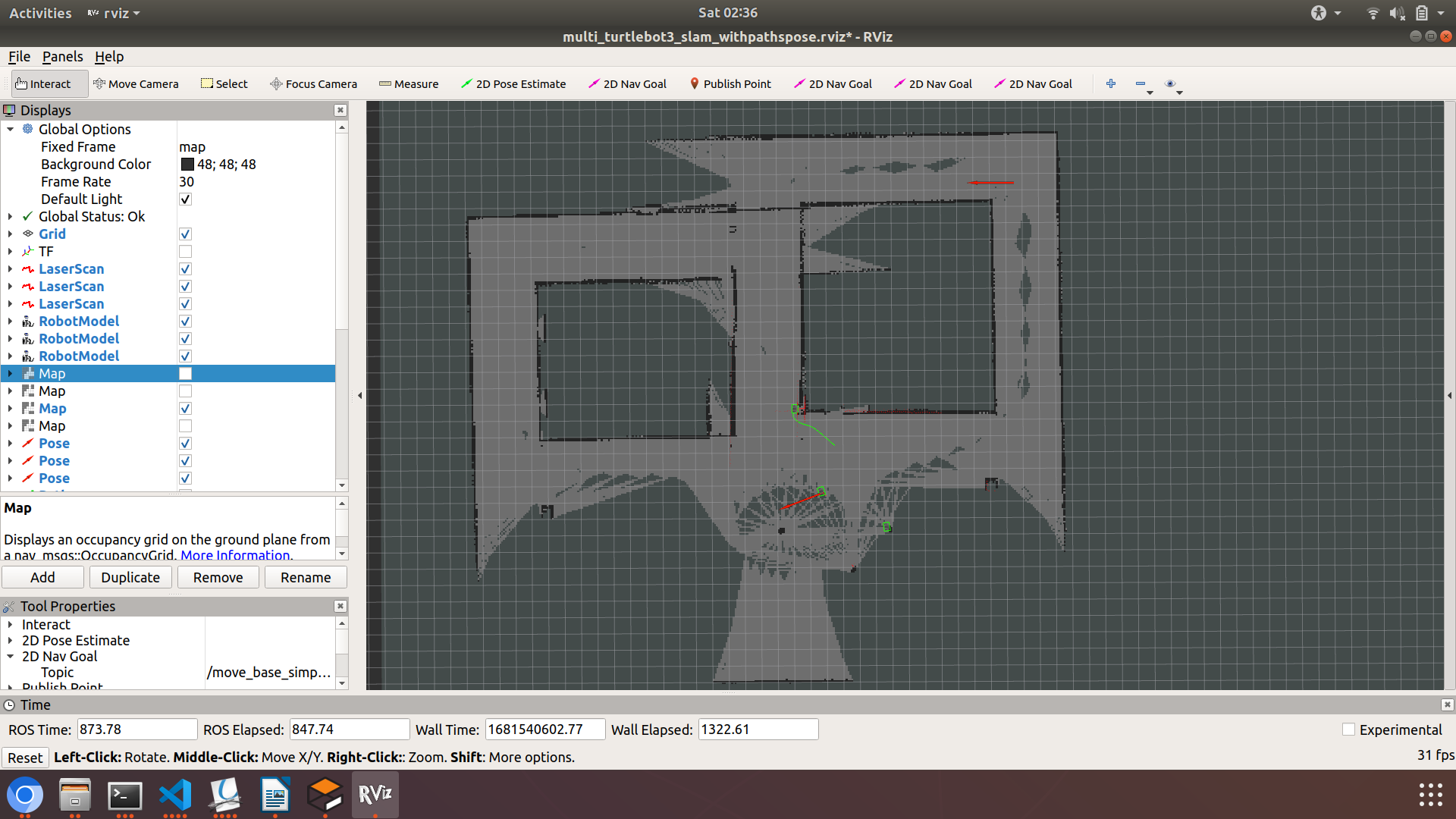
I am using gmapping slam package and did some testing with it for loop closure. I understand that gmapping does not explicitly solve for loop closure; instead it uses a scan-matching algorithm that assigns low weights to the particles which are eventually discarded if they do not match the hypothesis. In the image below I am running 3 turtlebot3s and I used the move_base goals to move one of them around the map to test for loop closure.
As you can see, the loop closure fails completely. I saw from this related question that setting the resampleThreshold to a higher value could solve the problem but for my case it does not seem to be performing loop closure properly. Can anyone give guidance on how I can solve this so that the loop closure works correctly?

Maybe using another slam can solve your problem. Try cartographer