
Generate header file from custom message for Arduino
Hello everyone! (My configuration: Ubuntu 18.04, ROS1 melodic, x86 intel CPU)
I am struggling with creating a custom message to use in Arduino script later.
My idea was to generate header file (EodImuData.h) and put it into the folder Arduino/libraries/ros_lib/my_folder_with_custom_messages
so I can #include std_msgs/EodImuData.h later
I followed the ROS manual: ros_custom_msg
Basically here is the sequence what I did:
Inside existing ros package,
begginer tutorialI've created
msgfolder- And added
EodImuData.msgfile to it. Which looks like that inside the file: C:\fakepathmsg_file.jpg
show it here too:
Header header
float32 acceleration_x
float32 acceleration_y
float32 acceleration_z
float32 gyro_x
float32 gyro_y
float32 gyro_z
- According to the ROS guide, all I
need to do is to modify
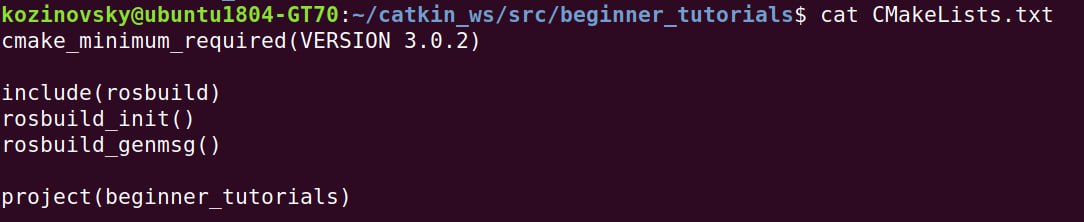
CMakeList.txtandpackage.xmlwhich I did, attached the screenshots of changes for these two files insidebeginner_tutorials
for CMakeList.txt
C:\fakepath\cmake_min_requred.jpg
C:\fakepath\cmake_find_packages.jpg
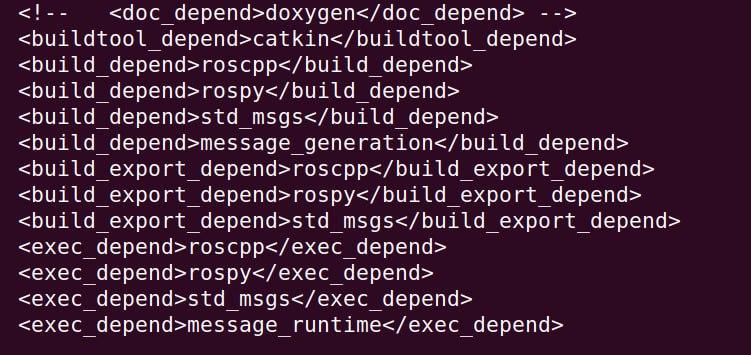
and for package.xml
C:\fakepath\package_message_generation.jpg
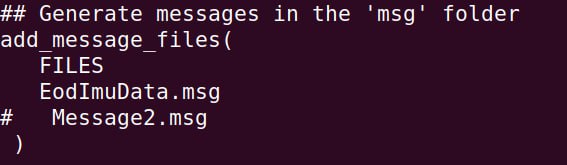
C:\fakepath\cmake_add_msg_files.jpg
- after these changes to
CMakeList.txtandpackage.xmlI go to the~/catkin_wsfolder and applycatkin_makecommand
After these actions I am expecting that folder catkin_ws/src/devel/include/beginner_tutorial will appear with EodImuData.h file inside, which I can copy to the Arduino/libraries/ros_lib/myfolder and #include it in my arduino script.
But, folder catkin_ws/src/devel/include/beginner_tutorial never has been created, so EodImuData.h file
I've tried another way, but looks like this one isn't correct one, I mean the command:
rosrun rosserial_client make_libraries Arduino/IMU beginner_tutorial
This command, yes, creates the folder Arduino/IMU with all standart libraries (headers files for bunch of common messages), but not a folder beginner_tutorial with header file which based on my custom EodImuData.msg file.
What am I missing/don't understand?
How can I get header file based on my .msg file to use it in Arduino script after?
Unfortunately can't attach CMakeList.txt and package.xml files, only pictures are allowed.
Thank you in advance!
Best, Andrey

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Please to not upload or link to screenshots of text. Instead you should copy/paste the text into your description and format it with the 101010 button. It's OK if the description gets long. Please just copy/paste your entire CMakeLists.txt file, so we can easily see if you left anything out.
This is not the correct path. The correct one is:
catkin_ws/devel/include/beginner_tutorial/EodImuData.h