
robot_localization ekf jumps
Hi, I have a robot with 2 GPS rtk and the odometry of the encoders, so I dicedied to use the dual_ekf_navsat example example from robot_localization, but adding another navsat_transform node to include the other gps so finally I have: * a local ekf node with just wheel odometry input * a global ekf node with fuses wheel odometry and the two sources of gps * two navsat_transform nodes that fuse the wheel odometry with a gps sensor
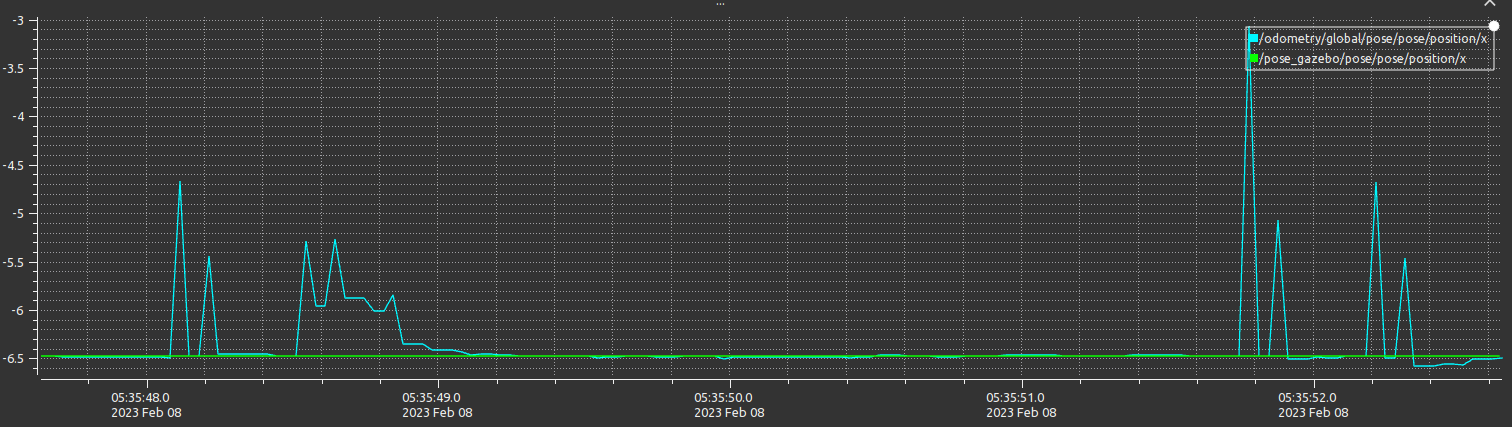
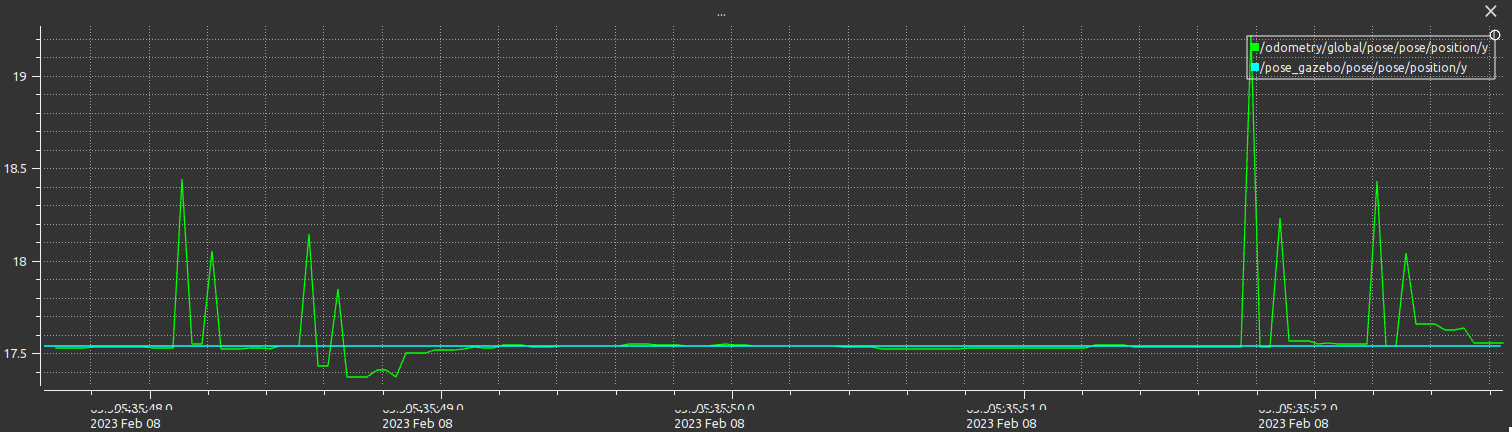
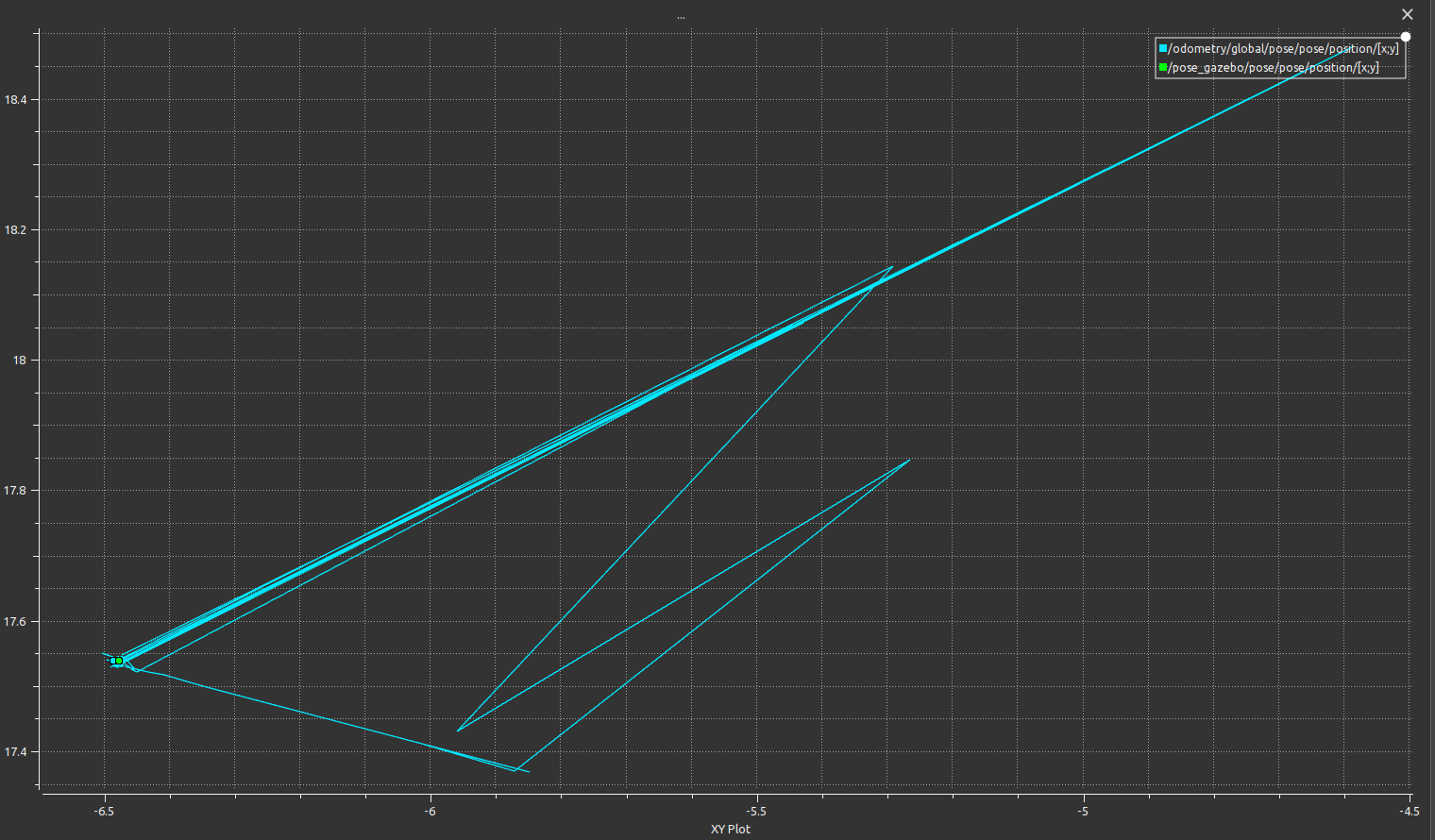
The problem is that the output of global ekf jumps in discrete time, I tested it with gazebo simulation and the real robot.
In the following images you can see the comparision of the gazebo pose of the robot and the estimate pose from global ekf
here you have the launcher and yaml file link
add a comment
