
Error when Connecting Doosan robot arm
Hi,
I have a new Doosan A0509s arm. I am trying to run it using ROS.
The virtual mode works and launches properly when using the following -
roslaunch dsr_launcher dsr_moveit.launch model:=a0509
The problem arises when I am connecting the Real robot. I am running the following -
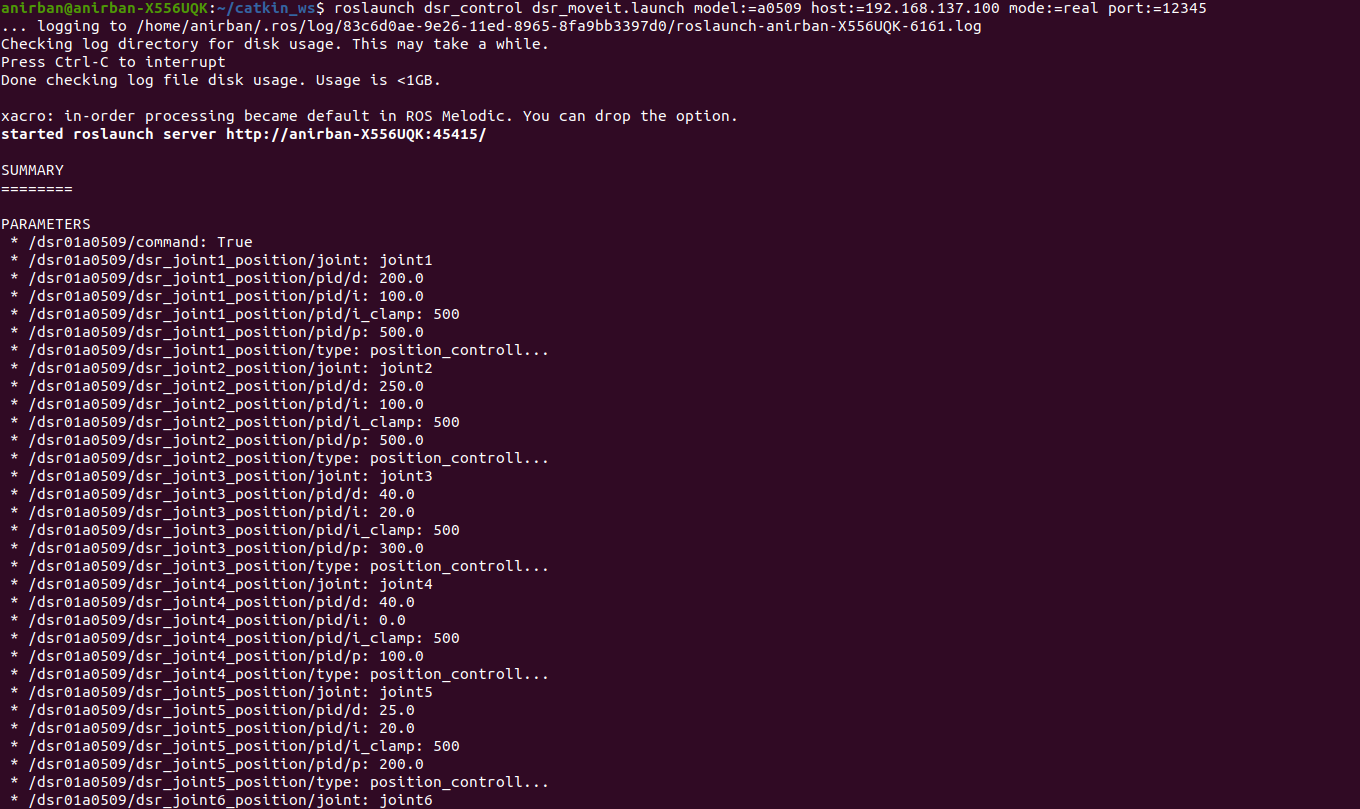
roslaunch dsr_control dsr_moveit.launch model:=a0509 host:=192.168.137.100 mode:=real
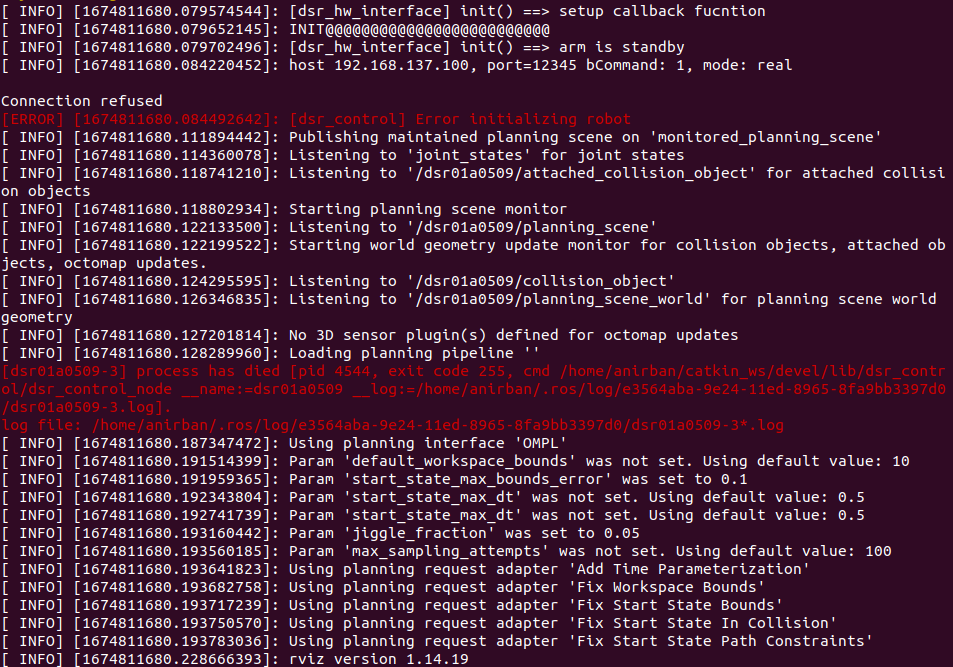
But, I am getting the following errors -
Connection refused [ERROR] [1674121841.041127378]: [dsr_control] Error initializing robot
[dsr01a0509-3] process has died [pid 40413, exit code 255, cmd /home/anirban/catkin_ws/devel/lib/dsr_control/dsr_control_node __name:=dsr01a0509 __log:=/home/anirban/.ros/log/bb3cbe20-97de-11ed-9a96-67be539470cf/dsr01a0509-3.log]. log file: /home/anirban/.ros/log/bb3cbe20-97de-11ed-9a96-67be539470cf/dsr01a0509-3*.log
I am able to ping to 192.168.127.100 when using the real robot, but ROS is unable to connect to it.
System details - Ubuntu 20.04 Ros Noetic
Can you please help me debug this issue? Thank you.
Update : What I tried till now -
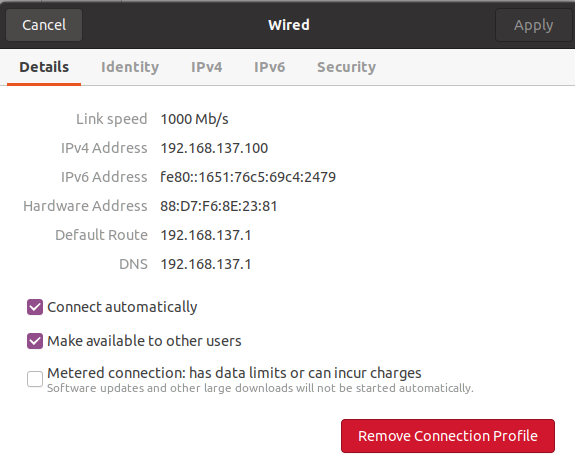
1) Ping - Pinging the ip 192.168.137.100 works. But error still exists.
2) Tried running with admin privilages sudo i -
$sudo -i
then cd into catkin workspace, then source. Then run the roslaunch. Did not work.
3) Checked firewall using ufw.
$sudo ufw
status Shows inactive. My Laptop is connected directly to the Robot Controller via Ethernet cable.
Update : I am adding the images of the robot, system and errors.
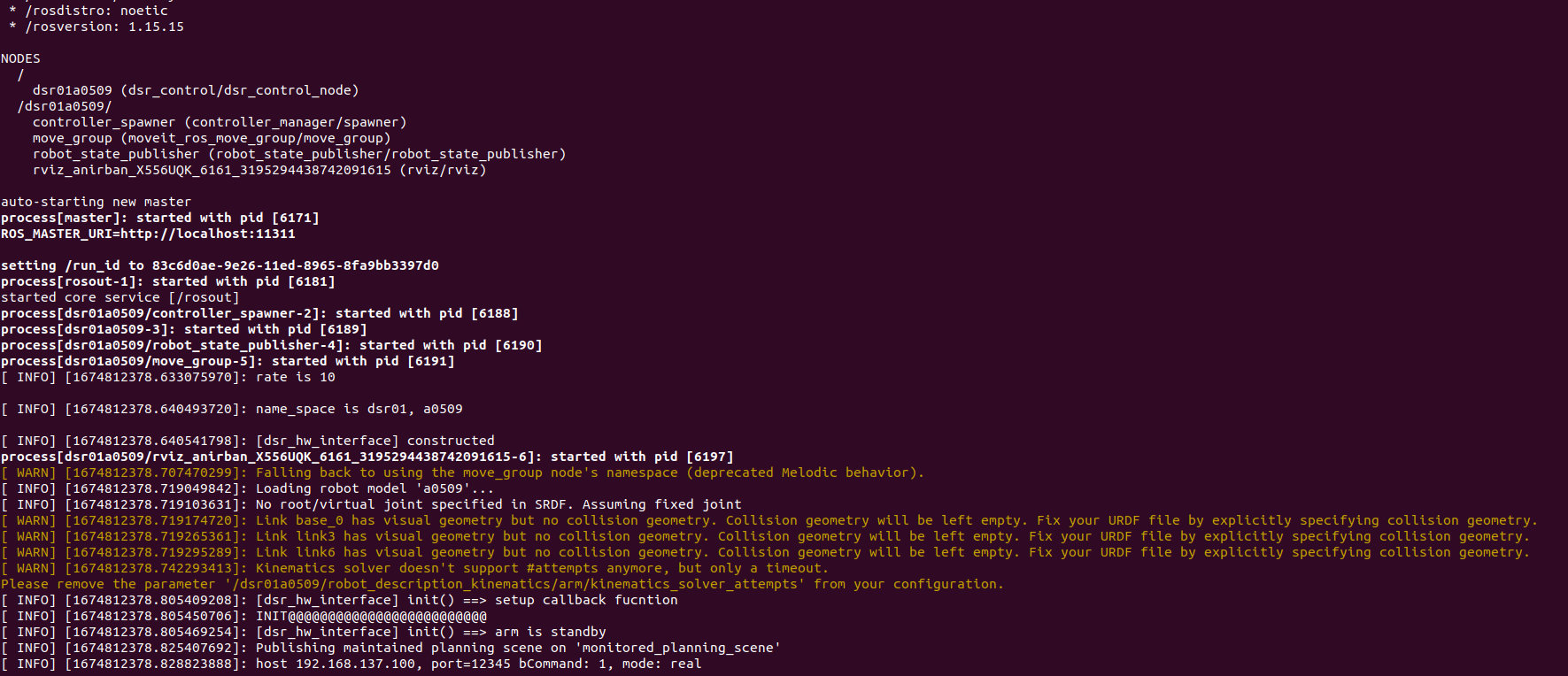
- Ros -
 --
--
- Error -
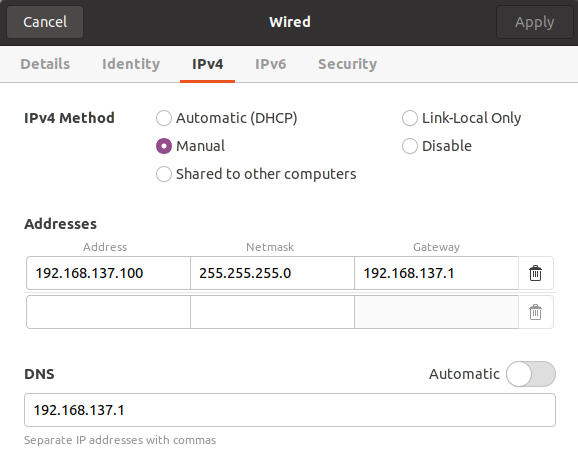
- Laptop connection -
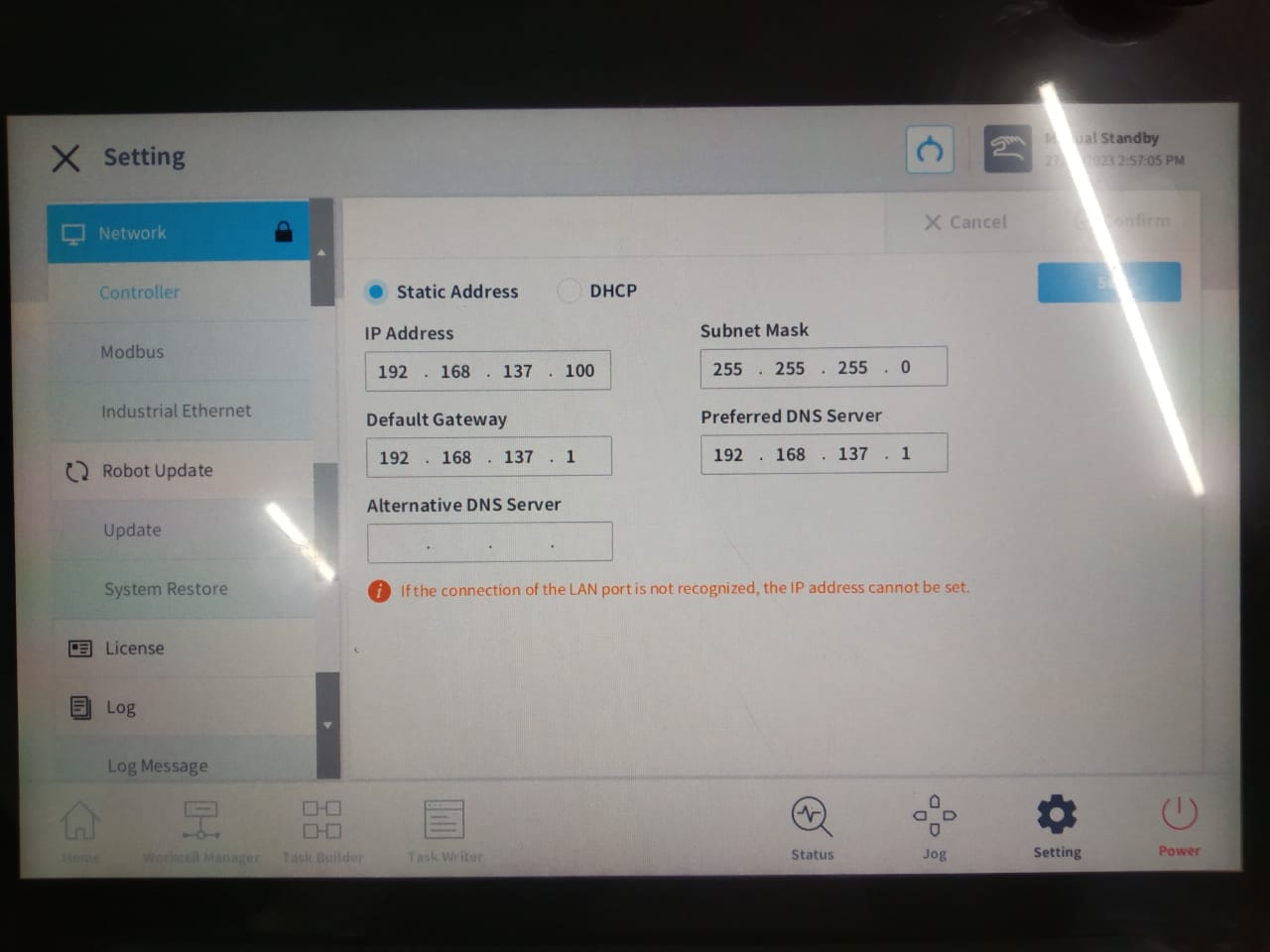
- Robot Teaching pendant -
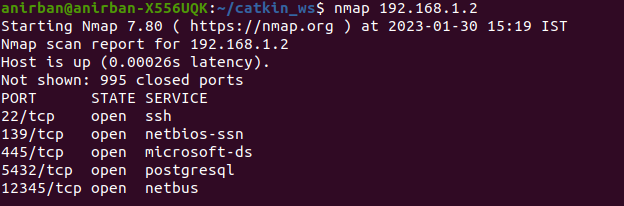

DId you added port number also of the robot or just the Ip address?
as you also need to pass port number as you can see in the file:
https://github.com/doosan-robotics/doosan-robot/blob/noetic-devel/dsr_launcher/launch/dsr_moveit.launchHi Ranjit, Thanks for the response. I tried adding the port also. But used the default port.
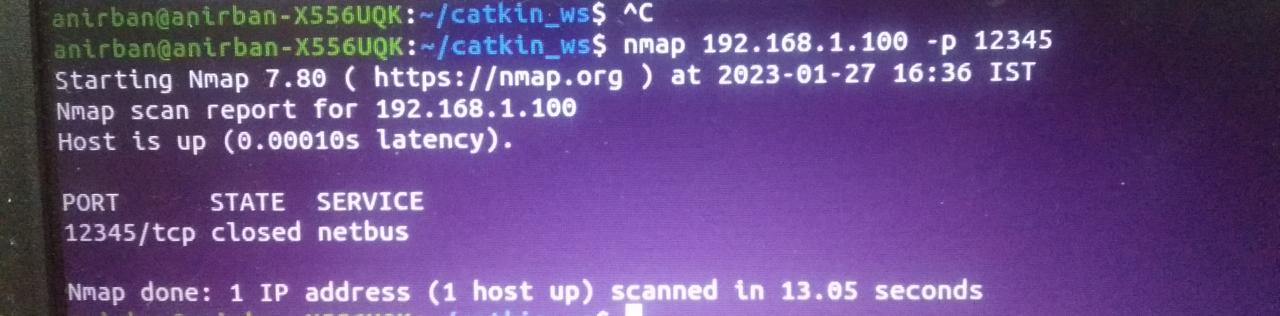
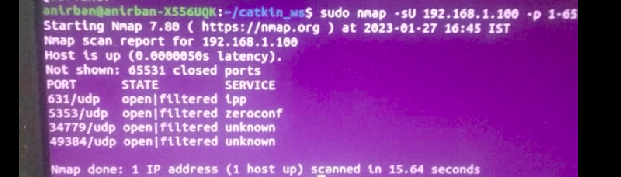
It still shows the error. (Obviously since the default is also 12345). Do you know how should I figure out what port to use? There is no port mentioned in the teaching pendant, and I donot see any port specifications in the manuals.
Have you checked your firewall in ubuntu? Is it not blocking your robot connection?
You now will be able to put images can you be able to provide as much information about both the robot and laptop? so I could get some hints that might be wrong.
Hi Ranjit, I checked the firewall in ubuntu. It shows inactive. I have added images of my system and the robot. I have also added the things that I tried till now. Error still persists.
Did you solve the issue?