
DWA cannot plan effective speed when encountering U-shaped path
Hi everyone.
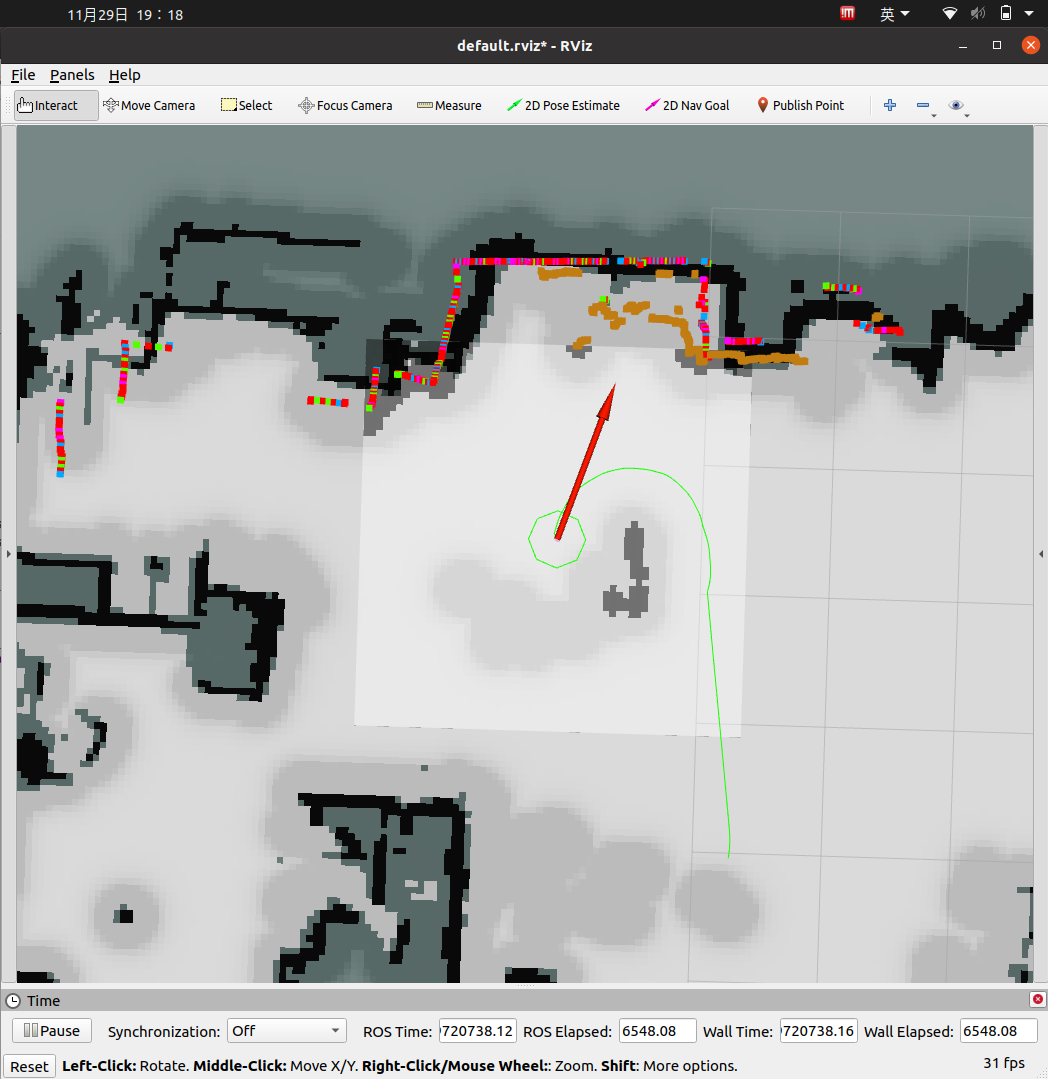
I'm using ROS noetic for navigation. When global_planner plans a small U-shaped path (with a radius less than 0.5m), and DWA cannot plan forward speed and steering speed. The robot just stays where it is and repeats its recovery behavior until the navigation task fails.However, there are no warnings or errors in the Terminal.
Here is a schematic diagram:
Here is my cfg file:
#move_base
controller_frequency: 10.0
controller_patience: 5.0
planner_frequency: 5.0
planner_patience: 7.0
conservative_reset_dist: 3.0
oscillation_timeout: 8.0
oscillation_distance: 0.2
recovery_behavior_enabled: true
clearing_rotation_allowed: true
#DWA
DWAPlannerROS:
max_vel_trans: 1.0
min_vel_trans: 0.1
max_vel_x: 0.8
min_vel_x: 0.0
max_vel_y: 0.0
min_vel_y: 0.0
max_vel_theta: 1.0
min_vel_theta: 0.1
acc_lim_x: 15.0
acc_lim_y: 0.0
acc_lim_theta: 10.0
acc_lim_trans: 1.25
prune_plan: false
xy_goal_tolerance: 0.1
yaw_goal_tolerance: 0.05
trans_stopped_vel: 0.3
theta_stopped_vel: 0.3
sim_time: 0.8
sim_granularity: 0.1
angular_sim_granularity: 0.1
path_distance_bias: 50.0
goal_distance_bias: 30.0
occdist_scale: 10.0
twirling_scale: 1.0
stop_time_buffer: 0.8
oscillation_reset_dist: 0.2
oscillation_reset_angle: 0.2
forward_point_distance: 0.3
scaling_speed: 0.25
max_scaling_factor: 0.2
vx_samples: 10
vy_samples: 1
vth_samples: 20
latch_xy_goal_tolerance: true
use_dwa: true
restore_defaults: false
Thanks in advance.
add a comment
