Unable to command the gripper from open-manipulator with moveit
Hello ROS community! :)
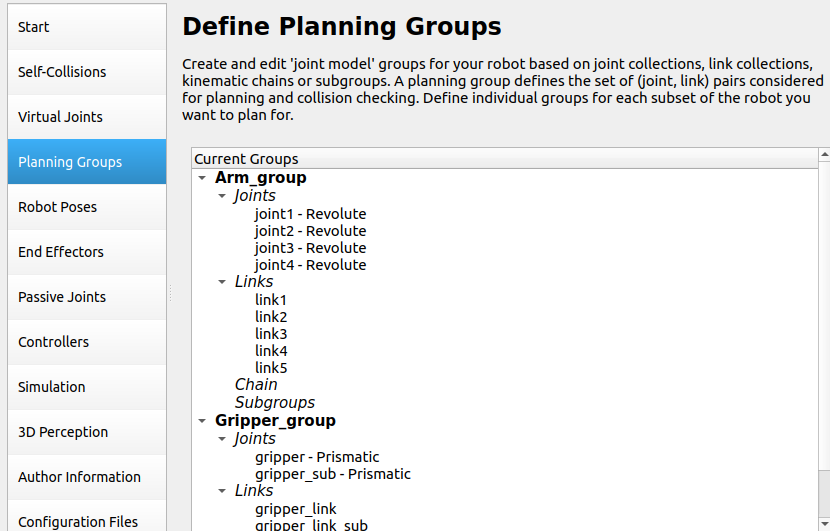
I am using ROS Noetic on Ubuntu 20.04 to control the openManipulator-X with MoveIt. This manipulator has two parts: arm and gripper.
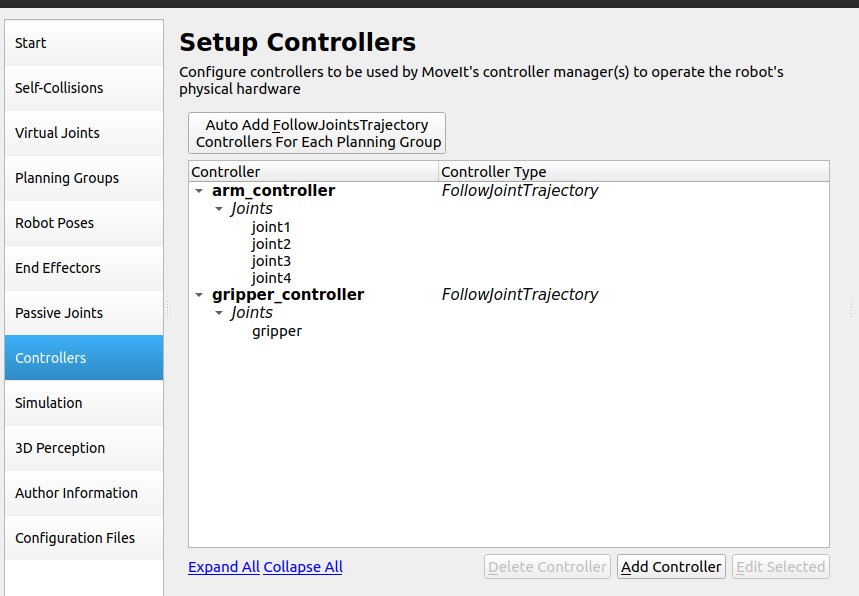
I used the moveit setup assistant to generate the launch files. Attached are screenshots from my configuration.
We also have a pyton file based on this tutorial that allows us to move the arm to a specified position.
The problem is that we cannot interract with the gripper.
For some reason, our python code using moveit stays stucked infinitely waiting in this line:
rospy.wait_for_service('/open_manipulator/goal_tool_control')
By the way, I did not added any end effector if it is significant with regard to my problem.
I suspect that the gripper controller should be a GripperCommand type, but when I modify it in the Moveit setup assistant, it automatically is setted again to FollowJointTrajectory. Do you see anything wrong in my conf that could explain it?
Thank you in advance and best regards.
Alexandre Laborie