
[Noetic]Can I use robot_localization with ROS Noetic? And how can I use navsat_transform_node?
Hello, I have a question.
I am using Noetic.
I want to use robot_localization, so I made a git clone, but when I look at the contents of the file, I see "--.launch.py" and "tf2", which seem to be for ROS2 only.
Question 1.
Can I use robot_localization with ROS Noetic?
I also want to use GPS information in robot_localization.
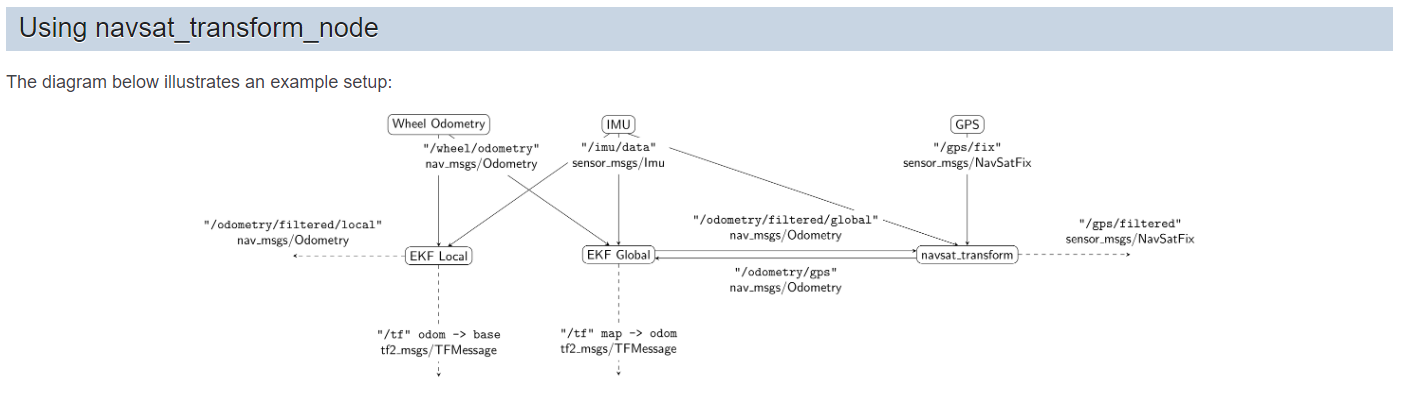
So now I am thinking of merging "navsat_transform_node" and "ekf_localization_node".
To fuse the two, publish "/gps/fix (sensor_msgs/NavSatFix)" to "navsat_transform_node", then from "navsat_transform_node", publish "/odometry/gps ( nav_msgs/Odometry)" must be published from "navsat_transform_node".
However, my GPS receiver is made by U-blox and I got the topic "/ublox/fix (sensor_msgs/NavSatFix)" by referring to the following URL.
https://github.com/KumarRobotics/ublox
Question 2.
I think "/gps/fix" should be rewritten to "/ublox/fix" in the file in robot_localization, but I cannot find the corresponding location (file). Therefore, I cannot publish the topic "/odometry/gps". Is there a workaround for this problem?
I thank you in advance.
Thank you.
