
Local planer does not follow global plan
Ubuntu 22.04 / ROS 2 Humble
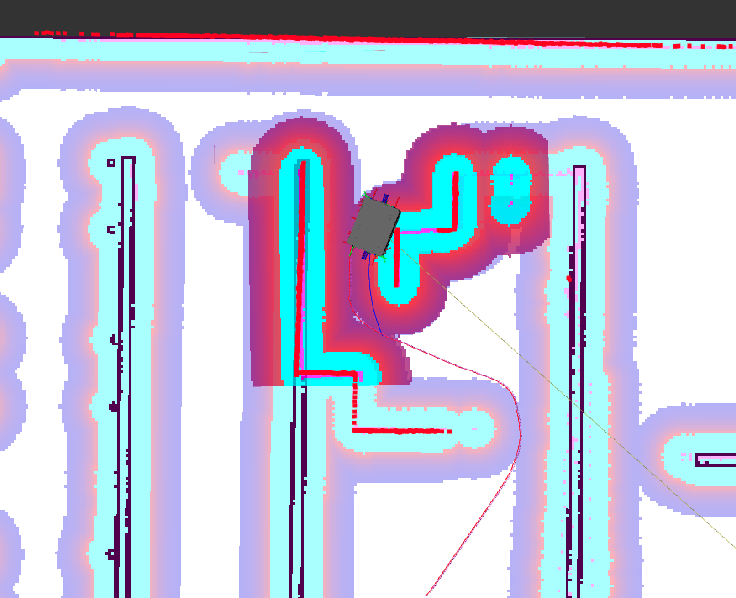
Hi, the local planner does not tightly follow the global plan in corners which makes the robot hit obstacles. This is not happening for the same simulation in Galactic. Thanks for helps.
add a comment
