
How to solve 'ERROR: toplevel: Undefined procedure: planvis_create/1 (DWIM could not correct goal)' ?
I followed Knowrob PlanVis.
I run the following command successfully.
rosrun rosprolog rosprolog mod_vis
register_ros_package(knowrob_actions).
owl_parse('/opt/ros/electric/stacks/knowrob/knowrob_actions/owl/serve_drink.owl', false, false, true).
And I run planvis_create got the error:
?- planvis_create(Pv).
ERROR: toplevel: Undefined procedure: planvis_create/1 (DWIM could not correct goal)
?-
How to solve it?
Thank you~
sam@sam:~$ apt-cache policy ros-electric-knowrob
ros-electric-knowrob:
Installed: 0.2.1-s1339740007~maverick
Candidate: 0.2.1-s1339740007~maverick
Version table:
*** 0.2.1-s1339740007~maverick 0
500 http://packages.ros.org/ros/ubuntu/ maverick/main amd64 Packages
100 /var/lib/dpkg/status
sam@sam:~$
After I reuse svn co to checkout, rosmake success!
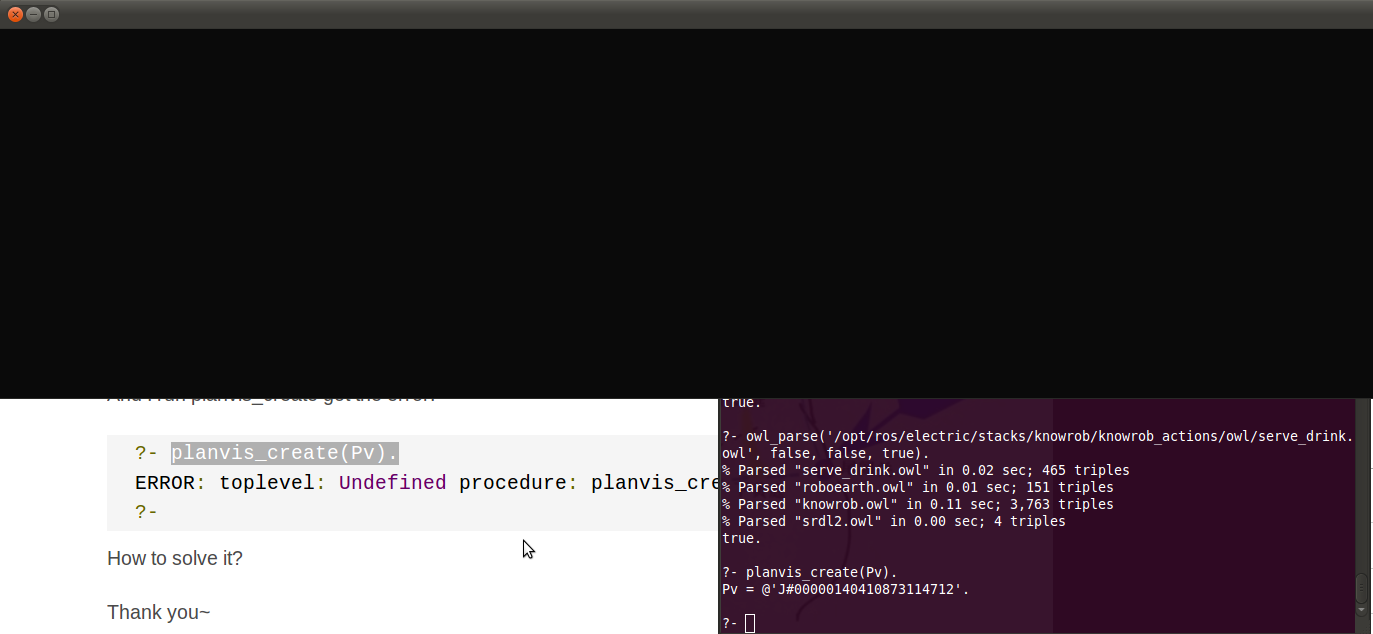
But when I run planvis_create, it shows nothing but empty window with black background.
?-
| register_ros_package(knowrob_actions).
true.
?- owl_parse('/opt/ros/electric/stacks/knowrob/knowrob_actions/owl/serve_drink.owl', false, false, true).
% Parsed "serve_drink.owl" in 0.02 sec; 465 triples
% Parsed "roboearth.owl" in 0.01 sec; 151 triples
% Parsed "knowrob.owl" in 0.11 sec; 3,763 triples
% Parsed "srdl2.owl" in 0.00 sec; 4 triples
true.
?- planvis_create(Pv).
Pv = @'J#00000140410873114712'.
?-
How to fix it?
Thank you~
add a comment
