
"imu_link" passed to lookupTransform argument target_frame does not exist.

I am trying to use cartographer using turtlebot3. But I'm trying to use a namespace. TF Tree is all configured, and rqt does not seem to have a big problem, but 'namespace/map' is not expressed in rviz with an error. What's the problem? Thank you for your help.
Here is my Error.
[ WARN] [1664806188.407947403]: W1003 23:09:48.000000 95039 tf_bridge.cc:52] "imu_link" passed to lookupTransform argument target_frame does not exist.
Here is my Launch file code. I didn't touch turtlebot's .lua file
<group ns = "$(arg first_tb3)">
<include file="$(find turtlebot3_bringup)/launch/turtlebot3_remote.launch">
<arg name="model" value="$(arg model)" />
<arg name="multi_robot_name" value="$(arg first_tb3)"/>
</include>
<param name="robot_description" command="$(find xacro)/xacro $(find multi_robot_vo)/urdf/turtlebot3_burger.urdf.xacro botname:=$(arg first_tb3)" />
<include file="$(find turtlebot3_teleop)/launch/turtlebot3_teleop_key.launch">
</include>
<!-- SLAM: Gmapping, Cartographer, Hector, Karto, Frontier_exploration, RTAB-Map -->
<!-- <include file="$(find turtlebot3_slam)/launch/turtlebot3_$(arg slam_methods).launch">
<arg name="model" value="$(arg model)"/>
<arg name="configuration_basename" value="$(arg configuration_basename)"/>
</include> -->
<!-- move_base -->
<include file="$(find turtlebot3_navigation)/launch/move_base.launch">
<arg name="model" value="$(arg model)" />
</include>
<!-- cartographer_node -->
<node pkg="cartographer_ros" type="cartographer_node" name="cartographer_node"
args="-configuration_directory $(find turtlebot3_slam)/config
-configuration_basename $(arg configuration_basename)"
output="screen">
<remap from="imu" to="flat_imu"/>
<!--remap from="points2" to="/camera/depth/points" / -->
</node>
<!-- cartographer_occupancy_grid_node -->
<node pkg="cartographer_ros" type="cartographer_occupancy_grid_node"
name="cartographer_occupancy_grid_node"
args="-resolution 0.05" />
</group>
<!-- flat_world_imu_node -->
<node pkg="turtlebot3_slam" type="flat_world_imu_node" name="flat_world_imu_node" output="screen" ns="$(arg first_tb3)">
<remap from="imu_in" to="imu" />
<remap from="imu_out" to="flat_imu" />
</node>
<node pkg="tf" type="static_transform_publisher" name="$(arg first_tb3)_map_to_$(arg first_tb3)_odom" args="0 0 0 0 0 0 /$(arg first_tb3)/map /$(arg first_tb3)/odom 100"/>
<node pkg="tf" type="static_transform_publisher" name="world_to_$(arg first_tb3)_tf_broadcaster" args="0 0 0 0 0 0 /map /$(arg first_tb3)/map 100"/>
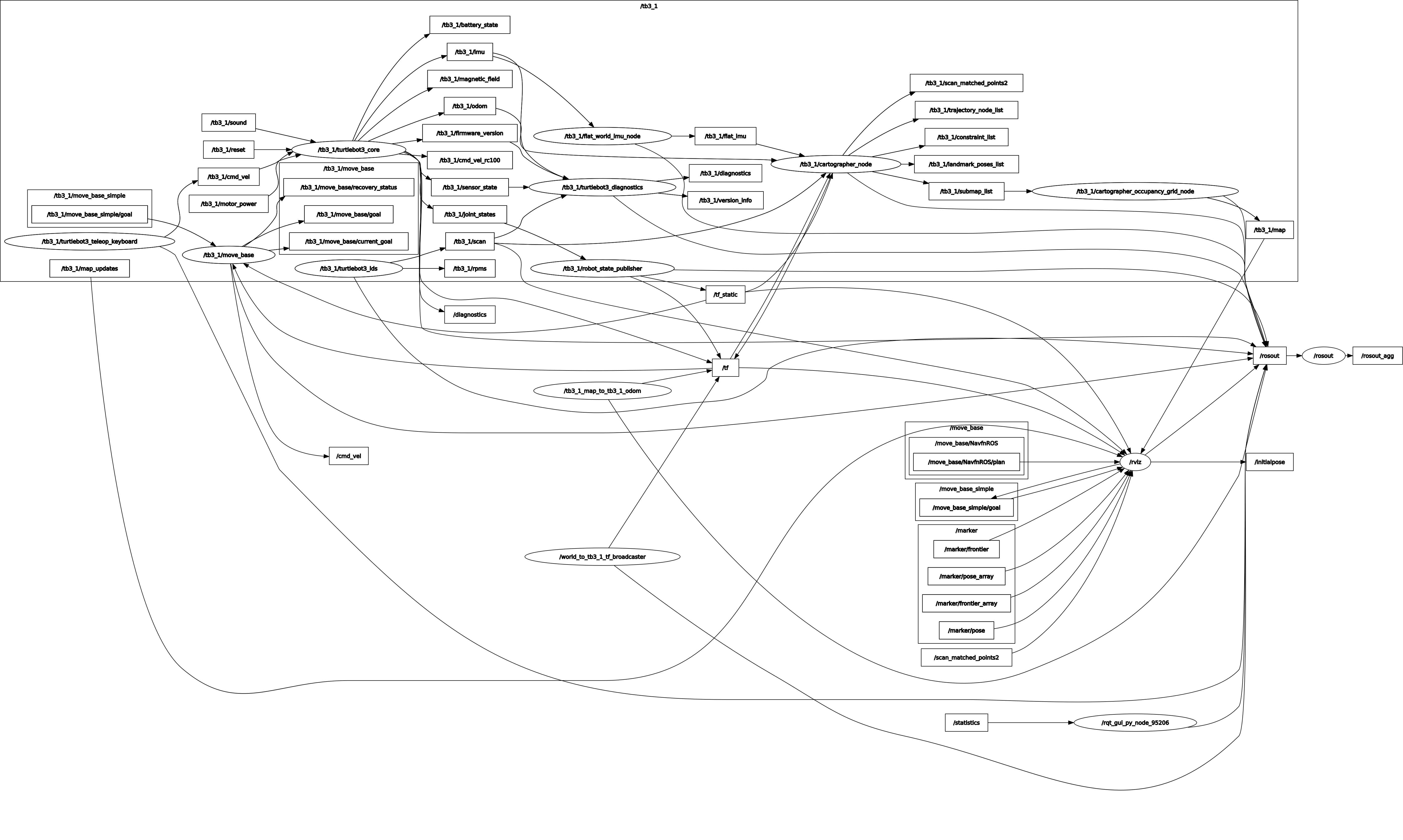
Here is my rqt graph.
Here is my TF Tree.


a suggestion, do not attache the images with text along the question. It is not readable. not even with 500% zoom