
gazebo world frame

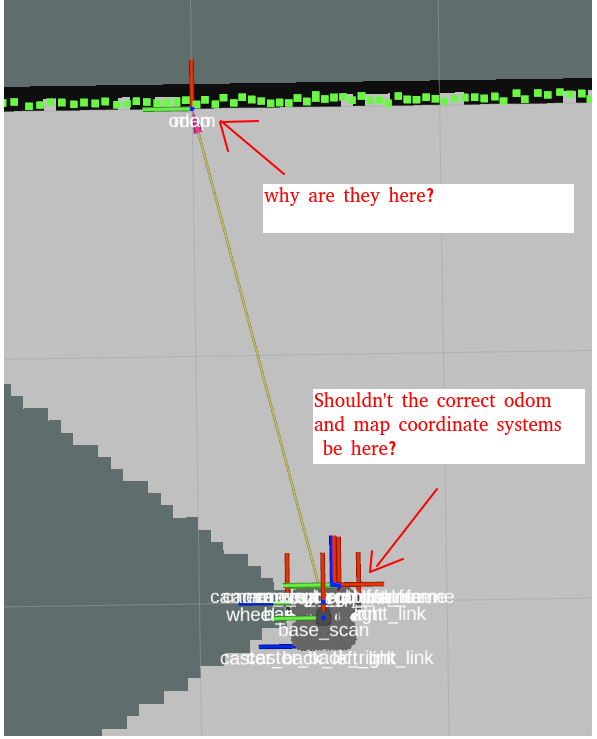
When I used the gazebo simulation of turbobot3, I encountered a thing that confused me. I used the gmapping algorithm to build a grid map. I found that the location of the odom and map coordinate systems was not in the initial position of the robot. In principle, shouldn't the odom and map coordinate systems be generated at the initial position of the robot?
The following picture describes my problem:
add a comment

