
Zed ros wrapper [SEARCHING] stuck
Description
Hello Dear Community.
I am using zed mini camera for the first time so I do not know what's happening.
I want to obtain visual inertia odometry data. I was using before the realsense T265 but it's broke now so I changed to zed mini.
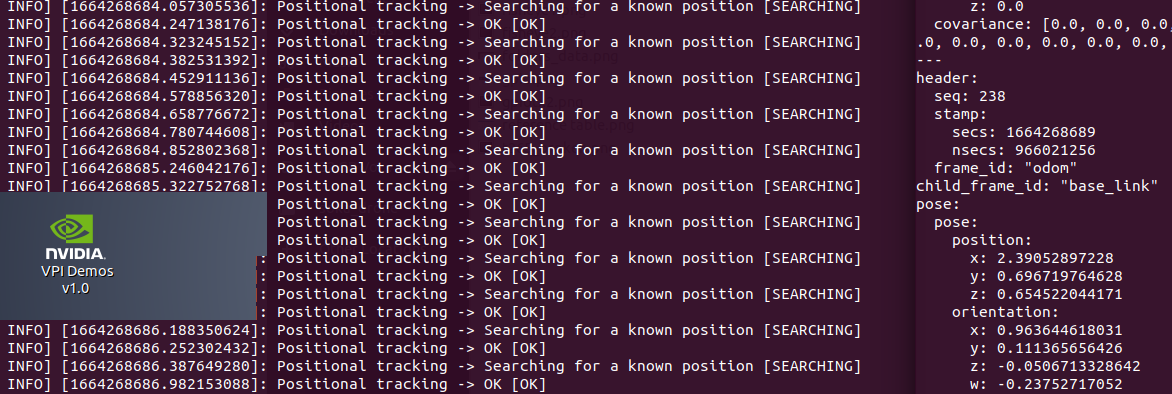
After installing the latest SDK and install the ROS package, when I run the lunch file zed_wrapper zedm.launch but I get this message infinite times Positional tracking -> Searching for a known position [SEARCHING]
Then if I echo this topic i can see the position and orientation but the position is giving me wrong values.
What could be the cause of this problem?
Steps to Reproduce
- Install ROS melodic 2.Install latest SDK 3.7 3.Install zed_wrapper package
- Run the launch file
roslaunch zed_wrapper zedm.launch...
Expected Result
Obtain position and orientation values
Actual Result
wrong values for position and orientation.
message Positional tracking -> Searching for a known position [SEARCHING]
ZED Camera model
ZED Mini
Environment
shell
OS: Ubuntu 18.04
ROS: Melodic
SDK: 3.7
If I change the parameter imu_fusion: to false, I can get better values but it seems is not using its IMU.

Possibly related to zed. Their support team can assist quickly!
What do you mean by wrong values for position? Could you please post some sample messages?