
X-Y axes for UR5 appear reversed
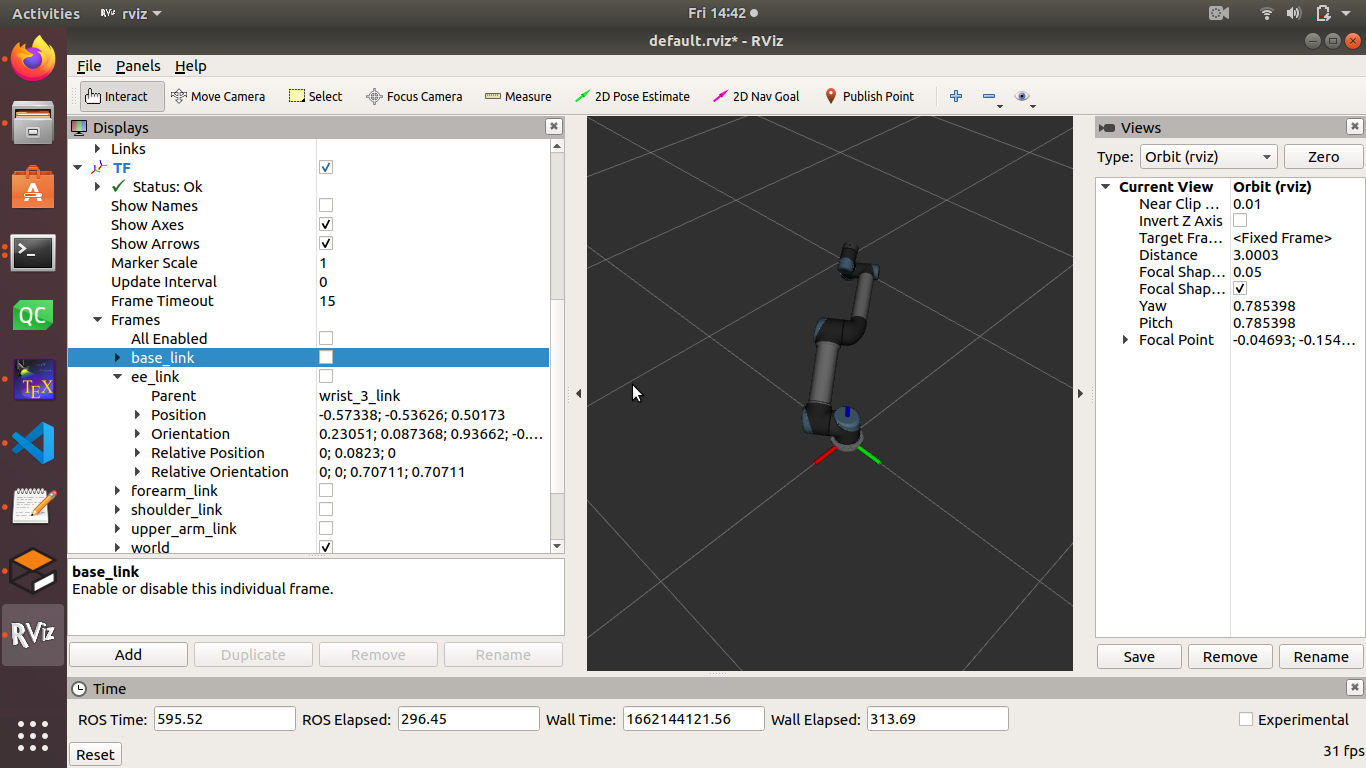
I'm trying to test a kinematic controller that relies on UR5 DH parameters. I'm using UR5 model in universal_robot and the classical DH parameters. The controller works but there is just one problem. The x-y axes are reversed. If I send 0.5i+0.5j+0.5k, the rviz shows -0.5i-0.5j+0.5k, see the below picture. You can see the the arm is going in the opposite direction of the x-y axes. How can I rectify this issue? I'm using Gazebo 9 and Melodic to simulate the robot. I really appreciate your help and feedback.
 .
.
add a comment
