
Nav2 not rotating to goal
Hi!
I am struggling with making my robot reach the goal. I get to it easily in pose, but not in orientation. After I get to the goal in pose, the robot struggles to rotate towards the correct orientation, in fact, it rotates really slow or it doesn't even rotate.
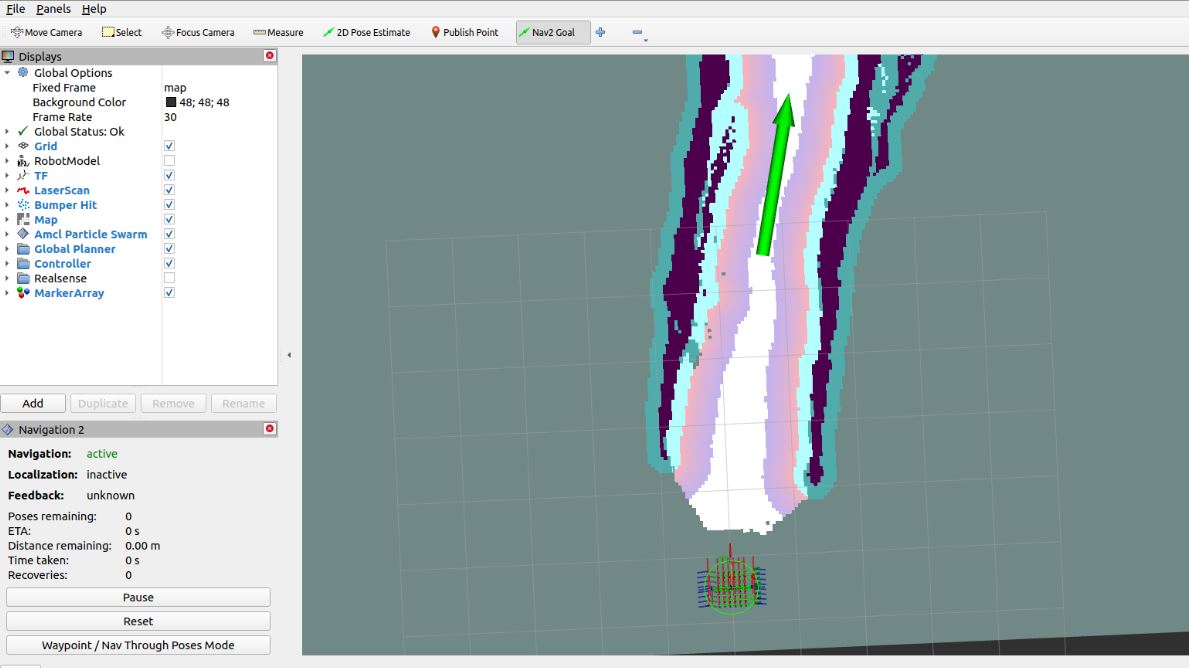
I have tried playing with the parameters of the DWB controller critics, specially with the RotateToGoal one, which has an slowing_factor to reduce the angular speed. I set this parameter to 1 instead of to 5 as it is by default, but I haven't obtained anything, even after setting a huge max_vel_theta of 4.5 rad/s.
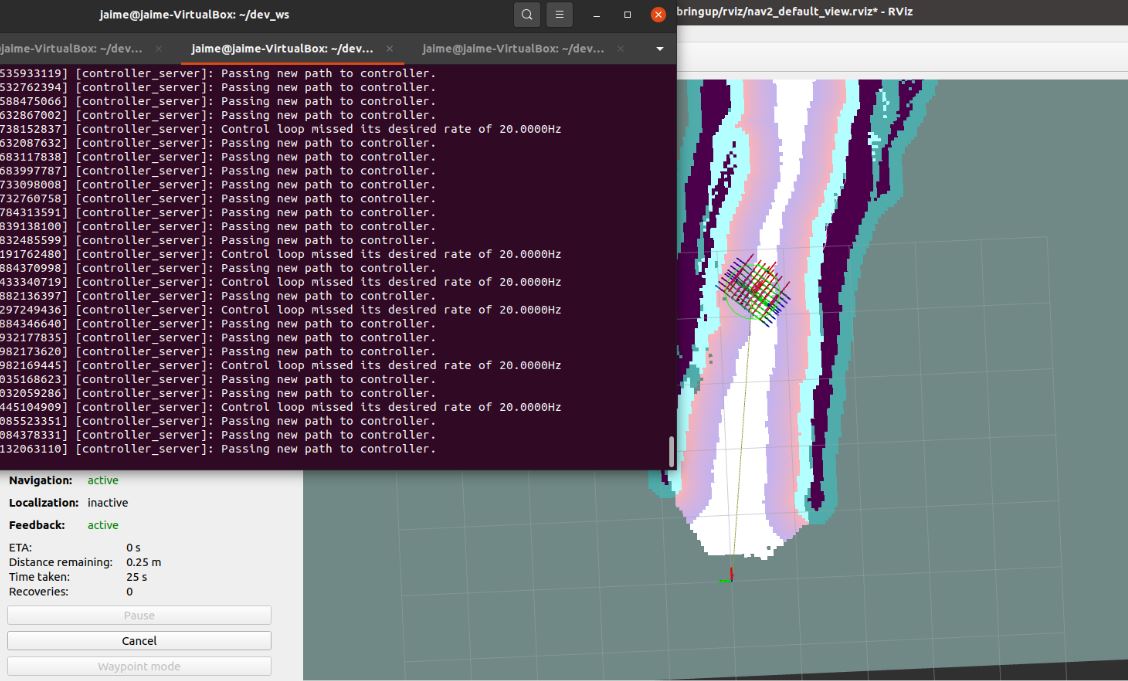
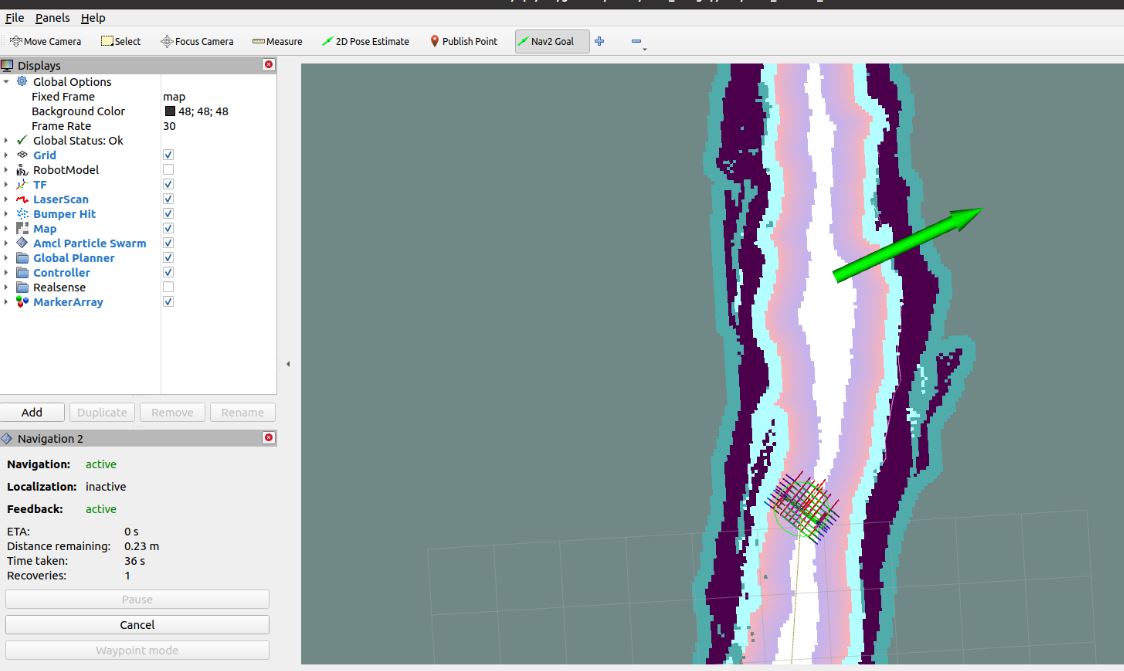
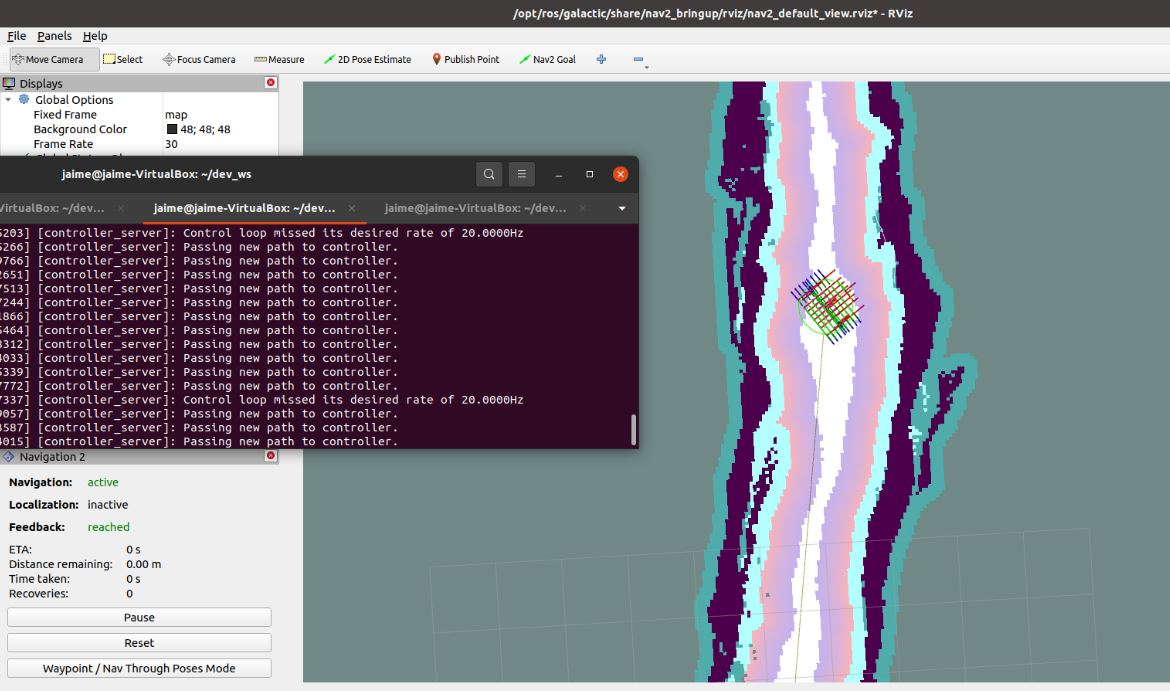
What's more, sometimes the robot reaches the goal with the correct orientation but the Controller doesn't seem to acknowledge it and keeps looking for a path. I checked the Goal Checker and it seems all the tolerances are perfectly defined and are not especially too low.
I also made the controller publish the cost_grid_pc, but I only get a pointcloud without any information, so I don't know whether the controller plugins are doing anything...
Any idea on what I can do or on where the problem might be?
Pd: here is my Controller config:
controller_server:
ros__parameters:
use_sim_time: True
odom_topic: /odom/unfiltered
controller_frequency: 20.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 0.3
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker"
controller_plugins: ["FollowPath"]
# Progress checker parameters
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.2
movement_time_allowance: 20.0
# Goal checker parameters
#precise_goal_checker:
# plugin: "nav2_controller::SimpleGoalChecker"
# xy_goal_tolerance: 0.25
# yaw_goal_tolerance: 0.25
# stateful: True
general_goal_checker:
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
stateful: True
# DWB parameters
FollowPath:
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: True
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 1.5
max_vel_y: 1.5
max_vel_theta: 4.5
min_speed_xy: 0.4
max_speed_xy: 1.5
min_speed_theta: 0.0
# Add high threshold velocity for turtlebot 3 issue.
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
decel_lim_x: -2.5
decel_lim_y: 0.0
decel_lim_theta: -3.2
vx_samples: 20
vy_samples: 10
vtheta_samples: 20
sim_time: 1.2
linear_granularity: 0.05
angular_granularity: 0.025
transform_tolerance: 0.2
xy_goal_tolerance: 0.25
trans_stopped_velocity: 0.5
short_circuit_trajectory_evaluation: True
stateful: True
publish_cost_grid_pc: True
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"]
BaseObstacle.scale: 5.0
PathAlign.scale: 32.0
PathAlign.forward_point_distance: 0.1
GoalAlign.scale: 24.0
GoalAlign.forward_point_distance: 0.1
PathDist.scale: 32.0
GoalDist.scale: 24.0
RotateToGoal.scale: 1.0
RotateToGoal.slowing_factor: 1.0
RotateToGoal.lookahead_time: -1.0
Thank you!

