
slam toolbox map_rotating(unstable)
i have a simple robot with encoders
i'm publishing the encoders data using rosserial arduino ..
and i made an external calcualtion(cpp package
)
to generate the odometry odom ->base _link whick works fine and i'm using kinect camera to generate a laser scan data with a ros1 to ros2 bridge.
see the video the map is causing a heavy rotates and its not fixed
MY TF
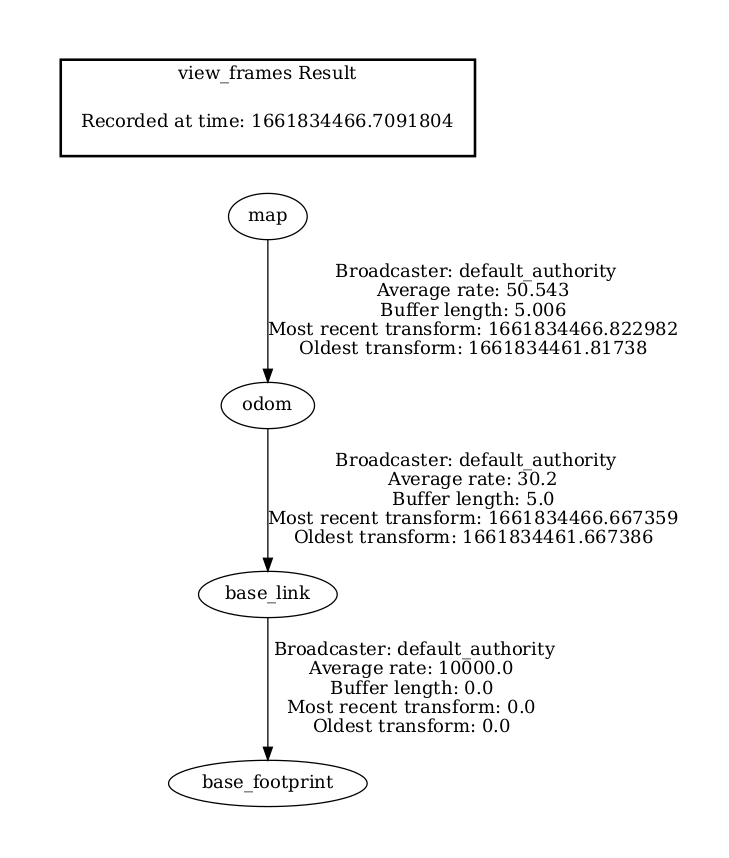
ANY SUGGESTIONS and i appreciate any help..

What is the question?
the map is causing a heavy rotates and its not fixed,how i can make it fixed
Please checkout this issue on github and the corresponding parameters that has been changed in the PR's linked to it.
Also, try using the default parameters.