
LiDAR : drag/line phenomenon between obstacles

Hello everyone,
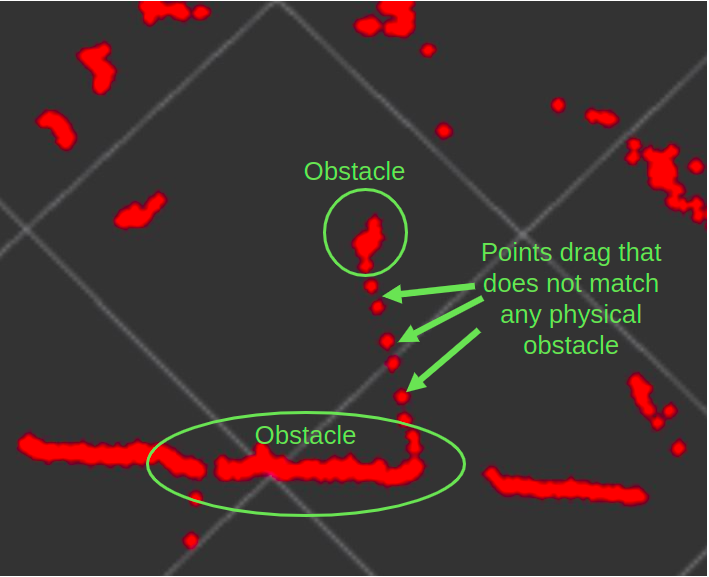
I was wondering if any of you was familiar with the phenomenon I observe with my 2D Lidar scans : there tend be lines composed of "ghost points" between the obstacles detected. These points do not match any physical obstacles and usually appear in line with surfaces with inclinaison near the tangent of the laser beam. See the image on the link below: https://drive.google.com/file/d/1sE3a...
 I've observed this phenomenon on three different LiDAR (3i-Delta2a, YdLiDAR TG-15 and SICK TIM-561) and wanted to know if this was something inherent to the LiDAR/laser technology and if there was a way to somehow neutralize this.
I've observed this phenomenon on three different LiDAR (3i-Delta2a, YdLiDAR TG-15 and SICK TIM-561) and wanted to know if this was something inherent to the LiDAR/laser technology and if there was a way to somehow neutralize this.
Best regards
Thomas,

I inserted the image into your description.
This is not normal. I have used a lot of lidars and not seen artifacts like this.
Thank you for the edit! After asking SICK engineers on the subject, I was told about the edge effect : when a laser beam hits near an edge, sometimes a part of the beam hits the first obstacle and another part of it hit the next obstacle. Two signals are received for a same emission and the distance calculation done by the LiDAR result in an intermediate value in between the distance of the first and second object. As explain here : here This could explain the variety of points between my physical obstacles. I am still reading papers about it to learn more about the phenomenon and eventually the way(s) to neutralize it.
Are you getting useful
intensities[]in the laser scan message? If so, maybe ignore the weaker reflections?I have actually tried to see if these points had lesser intensities. I enable RSSI (intensities) on the SICK LiDAR and it seems that these points don't have systematically lesser intensities. Moreover, I have real tangible obstacles that I want to be considered as such (by the costmap) that are returned with low intensities, so even filtering could not be considered anyway.