Calibration / Tuning Tool Support
Hi,
I've some years of experience in running ROS1 applications and tuning a limited number of scalar and vector parameters by means of rosparam.
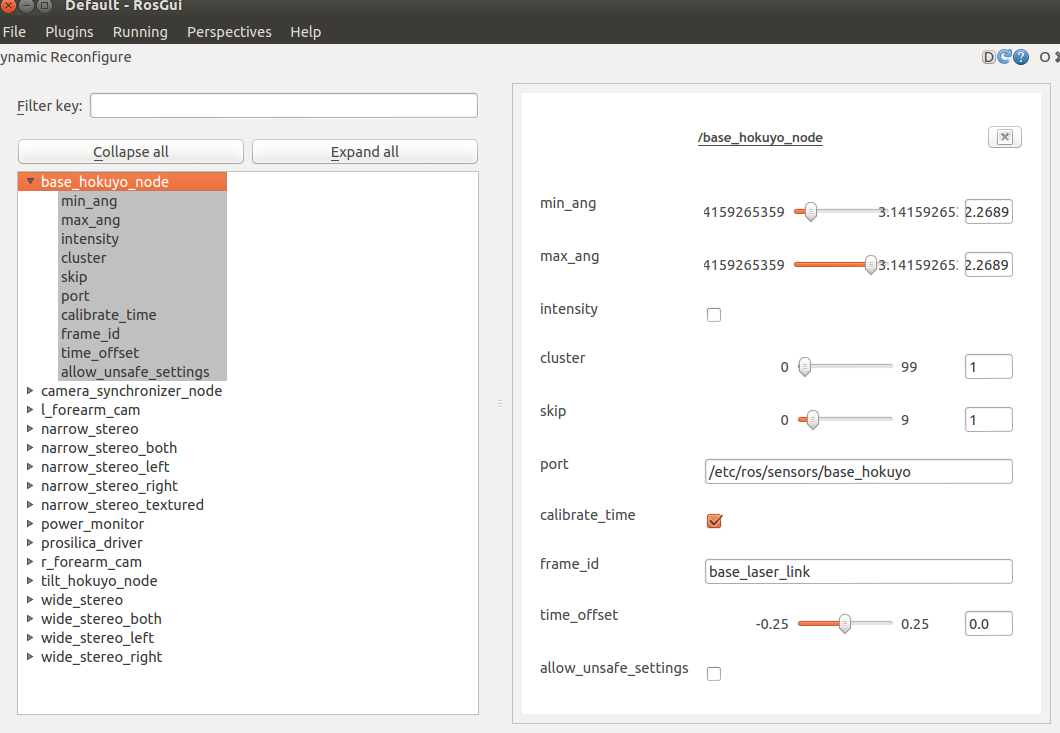
For future tasks I'd like to move an existing larger scale embedded application to ROS. As this application has a high number of parameters, I'm interested in more convenient (graphical) tools for tuning the ROS node.
Could you please give me a hint on that? This questions refers to ros1 and ros2.
Thanks
add a comment