
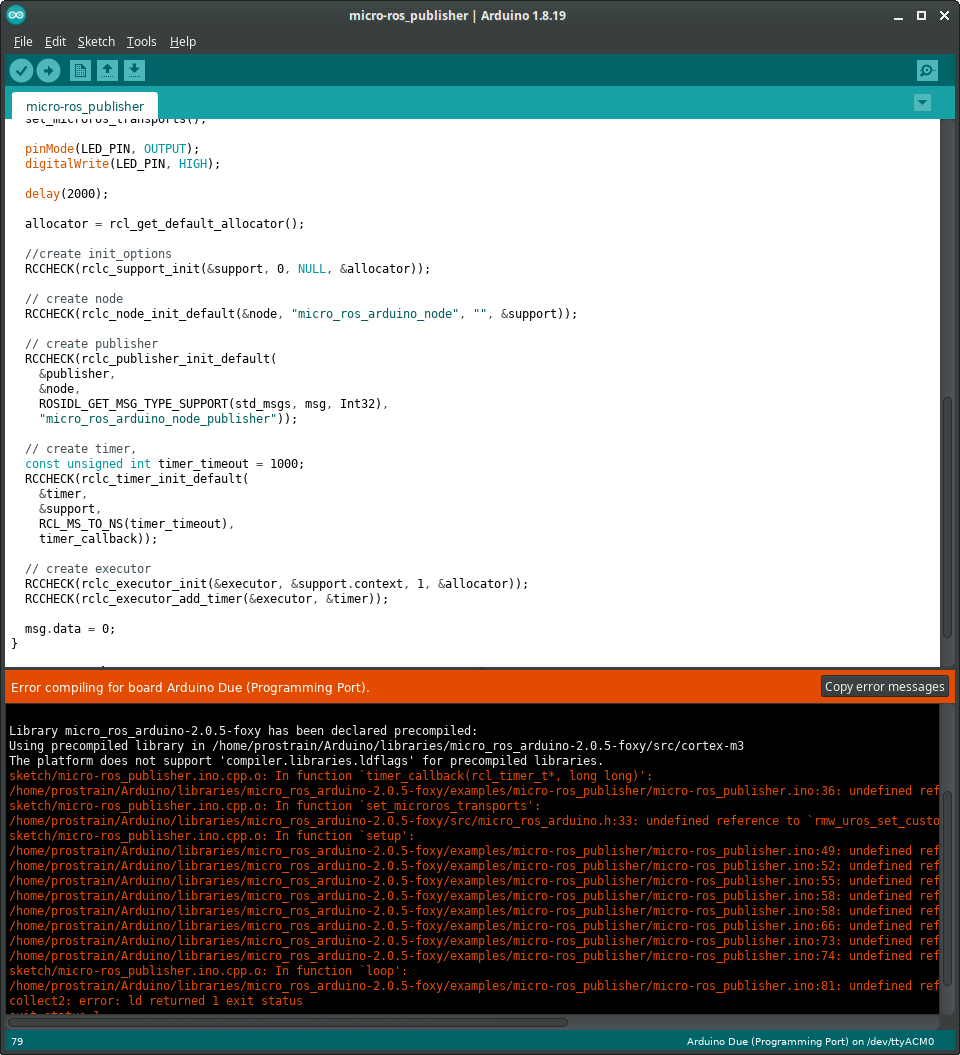
The platform does not support 'compiler.libraries.ldflags' for precompiled libraries.

Hi everyone,
A) My setup:
Xubuntu 20.04, ROS2 Foxy, microros foxy 2.05, Arduino Due, Jetson Nano 4GB
B) My question:
I just trying out microROS with my Arduino Due. However, this error come out when I try to just compile without uploading the code. Note that I already successfully build microros workspace according to this guide: https://micro.ros.org/docs/tutorials/... Can anyone help?
The platform does not support 'compiler.libraries.ldflags' for precompiled libraries.
C) What I have tried
I already did the patch SAMD guide based on this https://github.com/micro-ROS/micro_ro...
I already uninstall and install back Arduino IDE
I already try basic blink code to upload to my Arduino Due and it works. So now the problem revolve around the microros library.
I already setup microros workspace
D) Below is my platform.txt
The location: /home/<username>/arduino/arduino-1.8.19/hardware/arduino/avr
# Arduino SAM Core and platform.
# ------------------------------
#
# For more info:
# https://github.com/arduino/Arduino/wiki/Arduino-IDE-1.5-3rd-party-Hardware-specification
name=Arduino ARM (32-bits) Boards
version=1.6.12
# SAM3 compile variables
# ----------------------
compiler.warning_flags=-w
compiler.warning_flags.none=-w
compiler.warning_flags.default=
compiler.warning_flags.more=-Wall
compiler.warning_flags.all=-Wall -Wextra
compiler.path={runtime.tools.arm-none-eabi-gcc-4.8.3-2014q1.path}/bin/
compiler.c.cmd=arm-none-eabi-gcc
compiler.c.flags=-c -g -Os {compiler.warning_flags} -std=gnu11 -ffunction-sections -fdata-sections -nostdlib --param max-inline-insns-single=500 -Dprintf=iprintf -MMD
compiler.c.elf.cmd=arm-none-eabi-gcc
compiler.c.elf.flags=-Os -Wl,--gc-sections
compiler.S.cmd=arm-none-eabi-gcc
compiler.S.flags=-c -g -x assembler-with-cpp -MMD
compiler.cpp.cmd=arm-none-eabi-g++
compiler.cpp.flags=-c -g -Os {compiler.warning_flags} -std=gnu++11 -ffunction-sections -fdata-sections -nostdlib -fno-threadsafe-statics --param max-inline-insns-single=500 -fno-rtti -fno-exceptions -MMD
compiler.ar.cmd=arm-none-eabi-ar
compiler.ar.flags=rcs
compiler.objcopy.cmd=arm-none-eabi-objcopy
compiler.objcopy.eep.flags=-O ihex -j .eeprom --set-section-flags=.eeprom=alloc,load --no-change-warnings --change-section-lma .eeprom=0
compiler.elf2hex.flags=-O binary
compiler.elf2hex.cmd=arm-none-eabi-objcopy
compiler.ldflags=
compiler.size.cmd=arm-none-eabi-size
compiler.define=-DARDUINO=
compiler.combine.flags=-u _sbrk -u link -u _close -u _fstat -u _isatty -u _lseek -u _read -u _write -u _exit -u kill -u _getpid
# This can be overridden in boards.txt
build.extra_flags=
# These can be overridden in platform.local.txt
compiler.c.extra_flags=
compiler.c.elf.extra_flags=
compiler.cpp.extra_flags=
compiler.S.extra_flags=
compiler.ar.extra_flags=
compiler.elf2hex.extra_flags=
compiler.libraries.ldflags=
compiler.libsam.c.flags="-I{build.system.path}/libsam" "-I{build.system.path}/CMSIS/CMSIS/Include/" "-I{build.system.path}/CMSIS/Device/ATMEL/"
# USB Flags
# ---------
build.usb_flags=-DUSB_VID={build.vid} -DUSB_PID={build.pid} -DUSBCON '-DUSB_MANUFACTURER={build.usb_manufacturer}' '-DUSB_PRODUCT={build.usb_product}'
# Default usb manufacturer will be replaced at compile time using
# numeric vendor ID if available or by board's specific value.
build.usb_manufacturer="Unknown"
# SAM3 compile patterns
# ---------------------
## Compile c files
recipe.c.o.pattern="{compiler.path}{compiler.c.cmd}" {compiler.c.flags} -mcpu={build.mcu} -mthumb -DF_CPU={build.f_cpu} -DARDUINO={runtime.ide.version} -DARDUINO_{build.board} -DARDUINO_ARCH_{build.arch} {compiler.c.extra_flags} {build.extra_flags} {compiler.libsam.c.flags} {includes} "{source_file ...