
Unable to change Nav2 BT tree
Hi!
I want to change the BT Nav2 is using, but it seems it doesn't change when I change it in the yaml file. I am using Ros2 Foxy, so here it is my bt_navigator configuration, where I define the xml file with default_bt_xml_filename:
bt_navigator:
ros__parameters:
use_sim_time: True
global_frame: map
robot_base_frame: base_link
odom_topic: "odom/unfiltered"
enable_groot_monitoring: True
groot_zmq_publisher_port: 1666
groot_zmq_server_port: 1667
default_bt_xml_filename: "navigate_w_replannning_and_round_robin_recovery.xml"
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
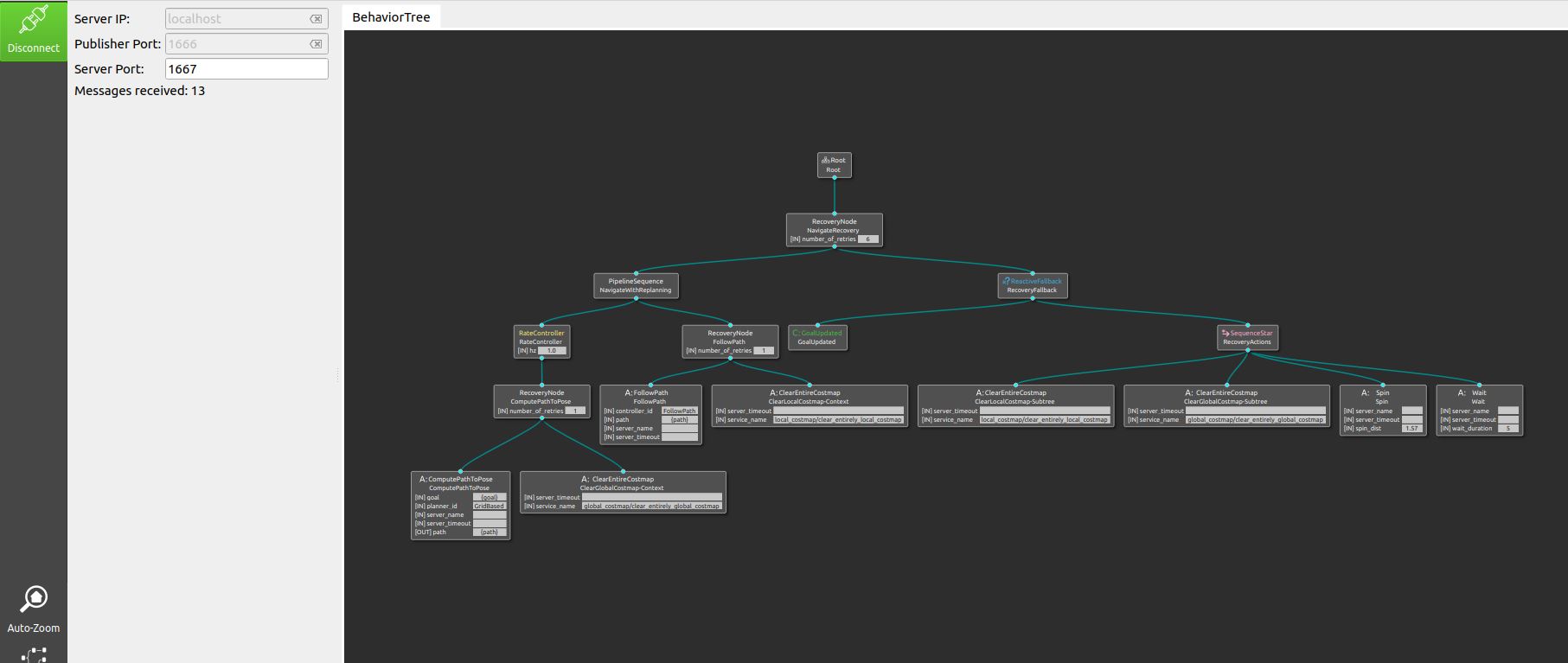
As you see, I am using the navigate_w_replannning_and_round_robin_recovery.xml from the predefined behavior trees. However, when I launch Groot in Control mode, this is the BT I get, which in fact is the navigate_w_replanning_and_recovery.xml:
add a comment

