
slam_toolbox offline slam
Hi, with reference to https://github.com/ros-drivers/ros2_o... I am unable to visualize the pointcloud in rviz if my fixed frame is not base_link or its children.... I went on to attempt recording a bag and tried launching offline slam but I get this chunk of messages in terminal:
[sync_slam_toolbox_node-1] [INFO] [1656682550.264695902] [slam_toolbox]: Message Filter dropping message: frame 'os1_lidar' at time 5867.116 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
Here is the bag: https://drive.google.com/file/d/1vKoF...
odom->base_link->everything else looks good... odom is being published by robot_localization
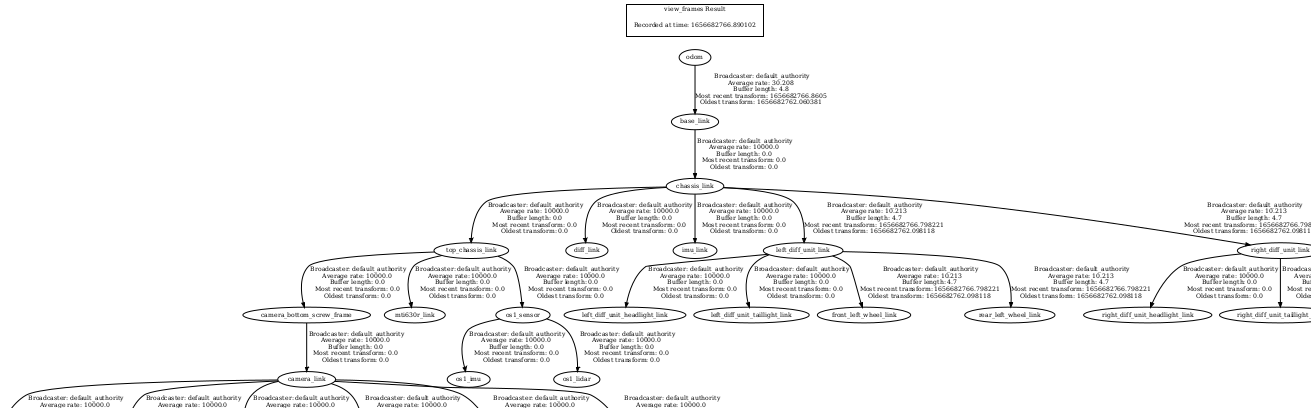
My TF Tree:
EDIT 1:
I was able to figure out that the timestamps on the lidar vs the other topics were way off:

I've set timestamp_mode: TIME_FROM_PTP_1588
Am i not supposed to set to this?
add a comment

