
Can't load mesh from package
I try to load in my xacro file a dae from relative path of on of my package:
<model name='tag0'>
<pose frame=''>-0.125 0.1 0 0 1.57 0</pose>
<static>1</static>
<link name='body'>
<visual name='tag0'>
<geometry>
<mesh file="package://model_gazebo/meshes/Marker0.dae" />
</geometry>
</visual>
<self_collide>0</self_collide>
<enable_wind>0</enable_wind>
<kinematic>0</kinematic>
</link>
</model>
When I use the dae 's absolute path, it works properly, but with the package way to load, there are no errors but the mesh file is not loaded.
How could I integrate my dae according to the package folder
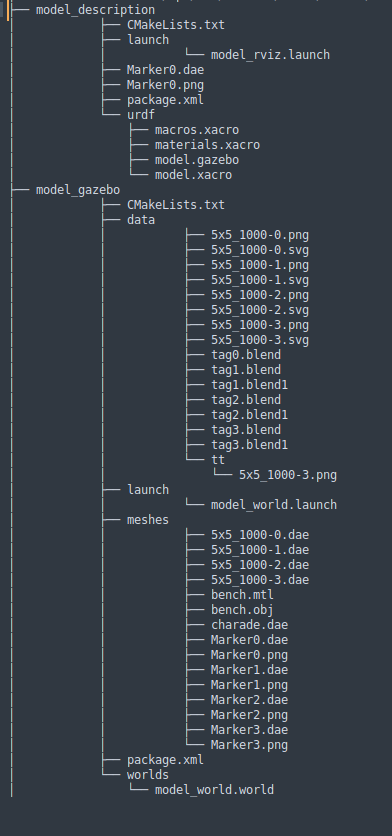
Edit: Here is the tree structure of my project:
add a comment

