
[Nav2] Keepout Zones - dynamic change of KeepoutFilter mask file during simulation

Hello,
I would like to use these tutorials with filter masks (keep out and speed filter):
As a basis for creating safety zones that the user can turn on and off while simulating multiple AMRs in the Gazebo world.
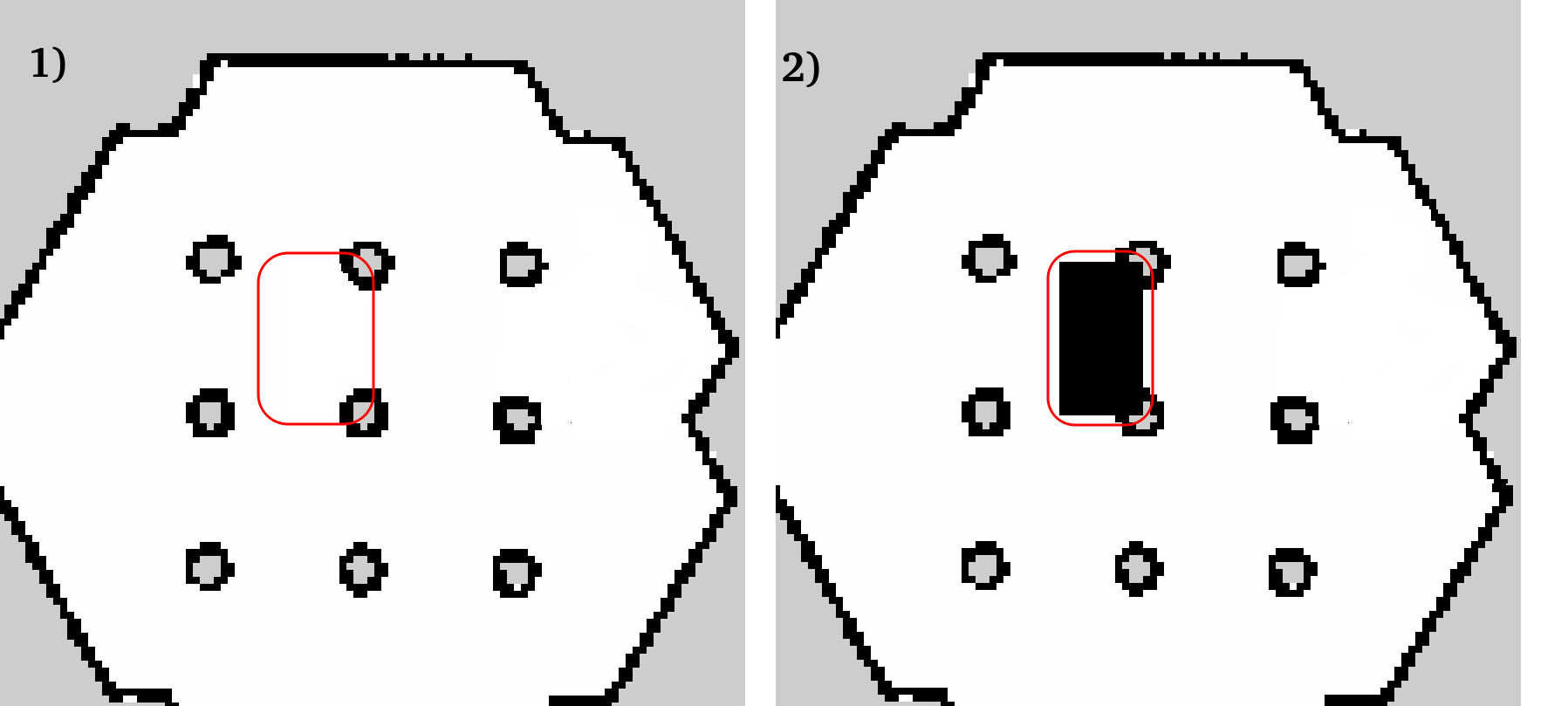
E.g. I prepared two mask files where robots can/cannot move:
1) a driveable corridor is free (there is no keep-out zone)
2) the same corridor, but this time it is blocked by a new part of the keep-out zone
The user can change state of these keep-out zones for selected robots using a special service. The robot can re-plan its global path to adapt after waiting a few seconds/cancel the target goal and await for a new move goal.
How should I approach this part of the problem with changing the keep-out mask file (PGM + YAML) in Costmap Filters during simulation? Would this be possible dynamically already? Or would this be a new feature to implement?
Best
Łukasz Janiec


I have a similar use case in mind where a node on the robot could detect and update the Keepout zones depending on the sensor observations (camera + vision).
@Alex-SSoM Yes, this kind of zone updates can be useful in many applications, that's why I am interested in this feature :)