the position of the detected object is not correct!!
hi,
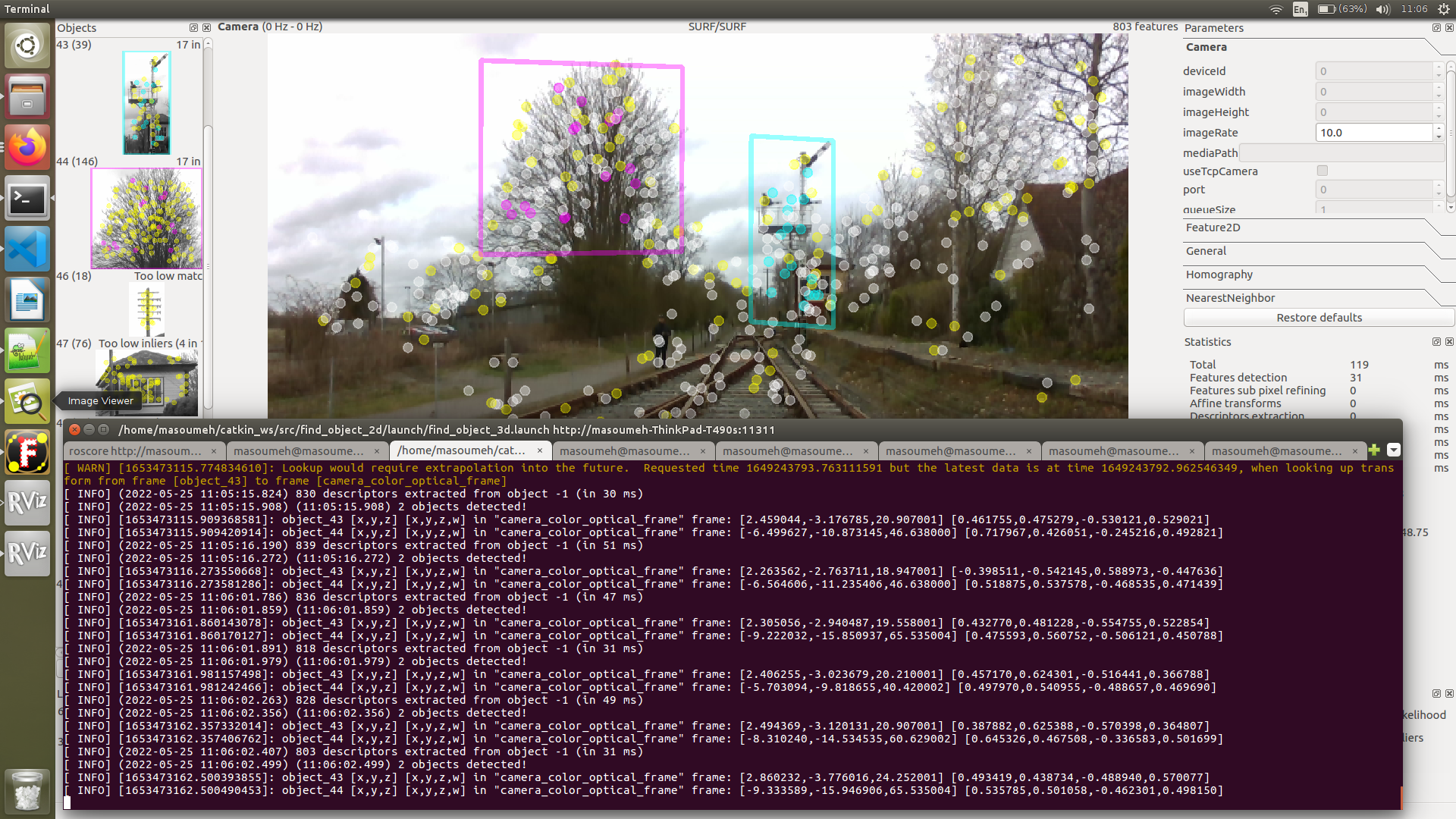
after launching find_3d_object.launch, i can see that the position of the detected object is not correct: in the following you can see one example. i have considered camera_color_optical_frame as the fixed frame. so i expect that the objects on the right hand side of my camera have a positive x and negative y, and positive for both x and y for those objects on the left side. but you can see that for the objects in the left side, both x and y are negative? why? i have considered: X forward Y left Z up
one more thing is that we expect by the movement of the vehicle toward objects, distance between them decrease, but the output sometime is increase and sometimes decrease.!!!!
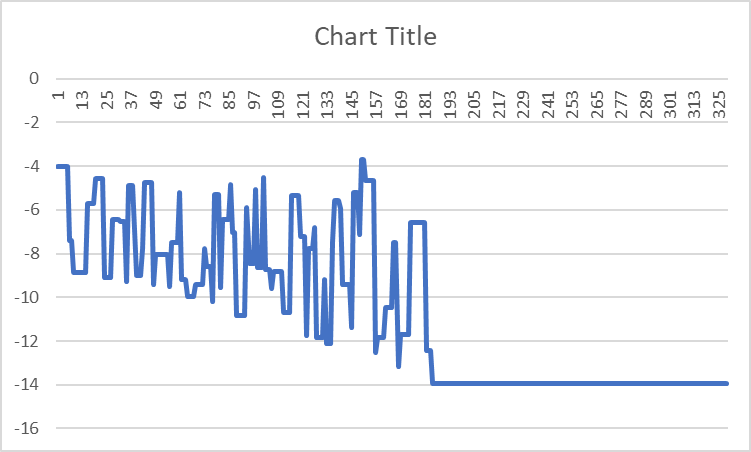
object_44 in the left sie, this is the plot about x position over time, from the time that it has been detected, and up to the time that the object disappear from the point of view of camera (vehicle is moving on the railway track)
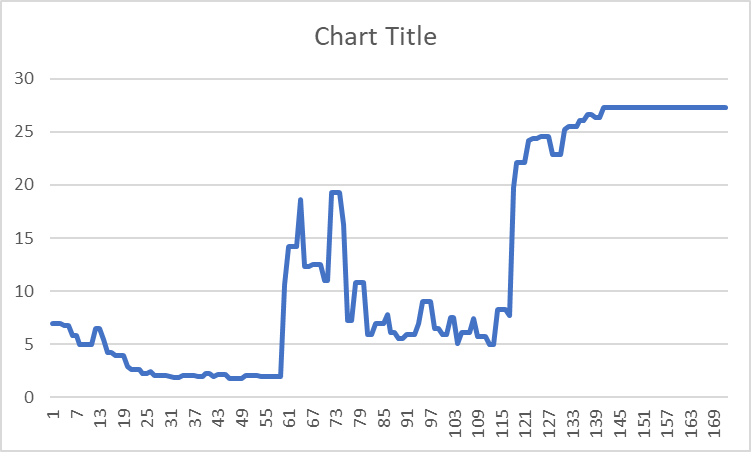
object on the right hand.