
Why collision is not working for UR5
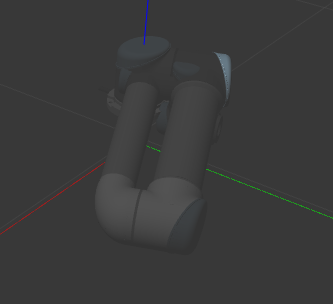
I'm using UR5 robot in Gazebo but I've noticed when there is no controller, the collision detection is not working in Gazebo 9. I'm wondering what is the problem. As you can see in the below picture, some parts penetrate others. I'm using the files in universal robot. I see the collision models are provided in urdf file. I'm using melodic in Ubuntu 18.04.
add a comment

