
Occupancy grid creation
Hi guys, I'm trying to implement my own controller in ROS1 Melodic for a mobile robot and now I'm facing the obstacle mapping problem.
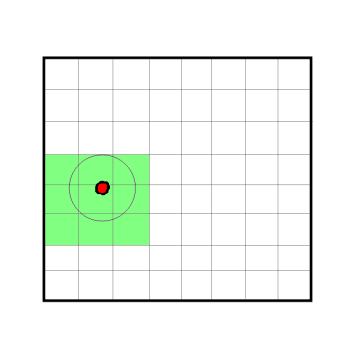
I'm starting from simple things such as the understanding of the nav_msgs::OccupancyGrid message and how to fill it, so I'm trying, for ex., to fill the grid with the -1 value right where there's the robot footprint during its movements. To do so, I developed a really simple node which gets odometry information to know the robot pose and publishes an updated OccupancyGrid. The part that I still have to understand better is the method to fill the OccupancyGrid message data.I tried to find something useful all over the web, but there's no explanation about this tasks
Here's the function that I would like to use
void OccupancyGridTest::SetRobotFreeCells()
{
// the pose of the robot coming from Odom and based on the grid resolution
int robotPoseGridX = static_cast<int>(robotPose_.x / gridResolution_);
int robotPoseGridY = static_cast<int>(robotPose_.y / gridResolution_);
// fills the full grid with 1
fill(myGrid_.data.begin(), myGrid_.data.end(), 1);
// highlighting the robot footprint on grid space with -1
for(int x = -((robotFootprint_ / gridResolution_)/2); x < ((robotFootprint_ / gridResolution_)/2); ++x)
{
for(int y = -((robotFootprint_ / gridResolution_)/2); y < ((robotFootprint_ / gridResolution_)/2); ++y)
{
int i = //MISSED CODE //
myGrid_.data[i] = -1;
}
}
myGrid_.header.seq++;
gridPub_.publish(myGrid_);
}
and here is how I initiate the grid
void OccupancyGridTest::InitGrid()
{
myGrid_.header.seq = 1;
myGrid_.header.frame_id = "/odom";
myGrid_.info.resolution = gridResolution_;
myGrid_.info.width = gridWidth_;
myGrid_.info.height = gridHeigth_;
myGrid_.info.origin.position.x = 0;
myGrid_.info.origin.position.y = 0;
myGrid_.info.origin.position.z = 0;
myGrid_.info.origin.orientation.w = 1;
myGrid_.info.origin.orientation.x = 0;
myGrid_.info.origin.orientation.y = 0;
myGrid_.info.origin.orientation.z = 0;
myGrid_.data.resize(gridWidth_*gridHeigth_,1);
}
I would like to know how to create the index i and if there's some errors in the cycles and/or there are other information that I should have
Thank you very much in advance
UPDATE
I added these lines within the nested for loops
int i = (x + robotPoseGridX) + (gridWidth_ * (y + robotPoseGridY));
if(i>=0) myGrid_.data[i] = -1;
If anyone wanna write something more is more than welcome, thank you
UPDATE II
I updated the SetRobotFreeCells member function to the following
void OccupancyGridTest::SetRobotFreeCells()
{
// the pose of the robot based on the grid resolution
int robotPoseGridX = static_cast<int>(robotPose_.x / gridResolution_);
int robotPoseGridY = static_cast<int>(robotPose_.y / gridResolution_);
int index;
fill(myGrid_.data.begin(), myGrid_.data.end(), 0);
// highlightin the robot grid space
if( (robotPoseGridX>=((robotFootprint_ / gridResolution_) / 2)) &&
(robotPoseGridY>=((robotFootprint_ / gridResolution_) / 2)) )
{
for(int x = - ((robotFootprint_ / gridResolution_) / 2); x < ((robotFootprint_ / gridResolution_) / 2); ++x)
{
for(int y = - ((robotFootprint_ / gridResolution_) / 2); y < ((robotFootprint_ / gridResolution_) / 2); ++y)
{
index = (x + robotPoseGridX) + (gridWidth_ * (y + robotPoseGridY));
if(index>=0) myGrid_.data[index] = -1;
}
}
}
else if( (robotPoseGridX<((robotFootprint_ / gridResolution_) / 2)) &&
(robotPoseGridY<((robotFootprint_ / gridResolution_) / 2)) )
{
for(int x = -robotPoseGridX; x < ((robotFootprint_ / gridResolution_) / 2); ++x)
{
for ...

You could convert msg.data to a 2D array first. The other solution i see is that
i = x*yThanks for the answer. The other solution can't be right cause the cell index must be related to the robot position