
Connect ROS with a KUKA manipulator
I am working on a school project that involves controlling a Kuka KR5 arc HW-2 robot with ROS. I already have the URDF model of the robot and my MoveIt support package to make it move in RViz and Gazebo. I have searched in many places but I have not found information on how to connect my robot to ROS, I would like to know if someone has worked with that manipulator or with others of the same brand, if so, how can I make the connection with Kuka robots?
I have seen that there is an Industrial ROS package called Kuka Experimental, but I don't quite understand the procedure, I am new to working with ROS.
Thank you very much in advance.
add a comment

 1. See if Kuka KR5 already provides any ROS package as hardware interface, if yes jsut using that will sove all issue
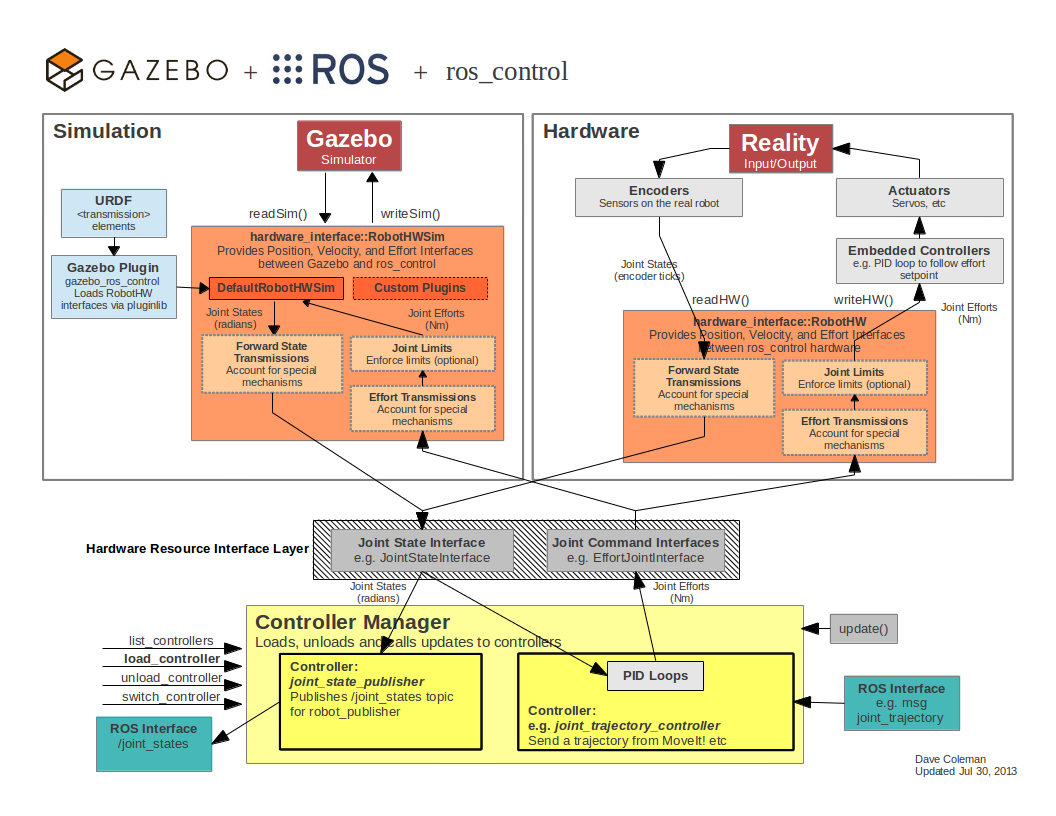
2. If not, than you will have to implement custom hardware_interface for your Kuka KR5 robot so that your ros controller eg. joint trajectory controller can control it through moveit in your case.
Here is the link/tutorial in which you can create your own hardware interface any robot in real =
1. See if Kuka KR5 already provides any ROS package as hardware interface, if yes jsut using that will sove all issue
2. If not, than you will have to implement custom hardware_interface for your Kuka KR5 robot so that your ros controller eg. joint trajectory controller can control it through moveit in your case.
Here is the link/tutorial in which you can create your own hardware interface any robot in real = 