
rosbag record subscribing false topic
I've created the following launch file (snippet) to record a few topics from a node. So the topic stream should be: lidar_run -> buffer_run -> record_run.
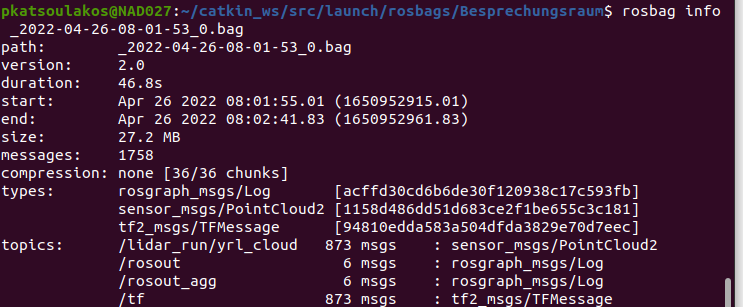
The messages sensor_msgs/PointCloud2 -> sensor_msgs/PointCloud2 -> unknown type (tyipical for recording with rosbag). The problem is that rostopic info shows me that buffer_run is subscribed by record_run, but in the bag file itself I found only the topic /lidar_run/yrl_cloud, which is originally from lidar_run.
Should I do a remap? I expected, that the topic from buffer_run (pointcloud_buffered) is contained in the bag file.
<!--1. start Yujin LiDAR node-->
<node pkg ="yujin_yrl_v2_package" type="yrl_pub" name="lidar_run"/>
<!--2. merge sensor messages (whole scan)-->
<node pkg ="pointcloud_buffer" type="pointcloud_buffer.py" name="buffer_run"/>
<!--3. start rosbag node-->
<node pkg ="rosbag" type="record" name="record_run" args="record -o /home/pkatsoulakos/catkin_ws/src/launch/rosbags/Besprechungsraum/ --split --duration=15m -a"/>
add a comment
